

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Пространственные размерные цепи 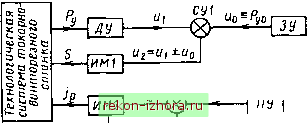 СУ2 ДУ-ЗУ обратная связь Рис. 1.10.22. Блок-схема двухконтурной САУ упругими перемешениями токарного станка: - динамометрический узел; СУ1 и СУ2 - сравнивающие устройства; - задающее устройство; ИМ1 и ИМ2 - исполнительные механизмы; У - профаммное устройство В случае разницы между i и щ на выходе СУ1 появляется сигнал рассогласования 2. который подается на исполнительный механизм ИМ1, представляющий собой электромашинный усилитель ЭМУ и электродвигатель постоянного тока привода продольной подачи. Сигнал 2, усиленный с по.мощью ЭМУ, изменяет скорость вращения ротора электродвигателя и как следствие величину S, в сторону сокращения сигнала и. Изменение S происходит до тех пор, пока сигнал м, станет равным сигналу щ, а это означает, что фактическая Ру стала равной заданной Ру. В задачу второго контура САУ входит изменение жесткости технологической системы по заданной профамме по пути продольного перемещения резца во время обработки. Изменение / осуществляется посредством изменения жесткостиJp регулируемого звена. Профаммное управление жесткостью происходит следующим образом: с профаммного устройства ПУ поступает cHrnaji щ, пропорциональный величинеур, которая обеспечивает требуемые значения/ технологической системе по координате х перемещения резца вдоль оси заготовки. Сигнал щ через сравнивающее СУ2 поступает на ИМ2, с помощью которого из.меняется величинаjp на нужную величину. Полученное значение jp конфолируется датчиком пojJoжcпия, с которого сигнал 4 по каналу обратной связи поступает на СУЗ. где сравнивается с заданным щ. В случае их несовпадения появляется сигнал ms. 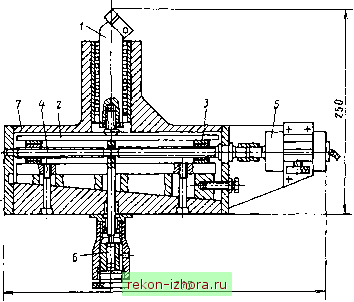 Рис. 1.10.23. Устройство для измерения Ру и изменения жесткости упругого элемента: / - резец; 2 - пружина (пластина); 3 - опоры; 4 - винт; 5 - электродвигатель; 6 - индуктивный датчик; 7 - корпус который поступает на ИМ2 и изменяет величину Ур так, чтобы она была равна требуемому значению. В рассматриваемой САУ блоки ДУ и ИМ2 совмещены в одном устройстве, схема которого приведена на рис. 1.10.23. Динамометрический узел представляет собой верхнюю часть суппорта. Это же устройство используется как ИМ2 для регулированияур. Во время обработки с этим суппортом действие радиальной составляющей силы резания передавалось через резец /, лежащий на роликах, на упругий элемент 2, выполненный в виде плоской пружины, свободно лежащей на двух опорах. Опорами являлись гайки 3 с правой и левой резьбой, через которые проходил винт 4 тоже соответственно с правой и левой резьбой. Возникающий под действием силы Ру прогиб упругого элемента 2 из.меряется индуктивным датчиком 6 и преобразовывается в электрический сигнал U\ и подается на СУ/, т.е. работает как ДУ. Электродвигатель 5, вращая винт, меняет расстояние между гайками 3 и тем самым изменяет жесткость упругого элемента. Датчик 6 осуществлял также контроль перемещений упругого элемента во втором контуре. Итак, рассмотренное устройство используется как для изменения жесткости технологической системы по заранее заданной профамме, так и для стабилизации у по сигналу датчика б. Во втором случае в системе управления должно быть предусмофено вычислительное усфойство, рассчитывающее фсбуемое значение жесткости технологической системы для компенсации возникшего отклонения. Профамма изменения жесткости технологической системы предназначена для компенсации совокупного действия систематических факторов путем соответствующего изменения величины упругого перемешения технологической системы. Если известна функция =f{x), то для ее осуществления надо определить функцию Ур =Дх). Величина изменения упругого перемещения Ау необходимая для компенсации пофешности диамефального размера детали в i-м сечении детали, определяется по формуле Дотах-До, (1.10.2) где Domax мэксимальный диамефальный размер после обработки детали с Рупах = const; Do, - диамефальный размер г-го поперечного сечения после обработки с max = COHSt И J. Требуемая величина жесткости технологической системы в г-м поперечном сечении вала для получения соответствующей величины упругого перемещения: где у1 -упругое перемещение технологической системы в сечении после обработки с Ру птах const. Величина упругого перемещения у1 определяется из формулы y.Do (1.10.4) где £)в,- диамефальный размер г-го сечения после выхаживания .
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |