

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Пространственные размерные цепи откуда Р р где г - расстояние между вершиной резца и осью врашения шпинделя; р - расстояние между центром поводка и осью врашения шпинделя. Крутящий момент приложен по оси вращения ОХш-Силы инерции, возникающие в системе из-за вращения неуравновешенных масс, в соответствии с положениями теоретической механики могут быть приведены к некоторой точке О и заменены главным вектором силой Ф и главным моментом сил инерции, который обозначим через М. Масса заготовки G действует в точке С - центре тяжести заготовки. Под действием указанных выше сил и моментов нарушается заданное относительное положение систем L, Хщ, S (координатную систему Sn решено не принимать во внимание, так как базирование заготовки осуществляется в центрах). Найдем аналитические выражения относительных перемещений этих координатных систем. Определим ynpyi ис перемещения системы 1. относительно системы Zg, принимаемой за неподвижную. С этой целью запишем аналитические выражения дсйсг-вуюших в технологической системе сил, моментов и координат точек их приложения (рис. 1.8.25), которые вызывают перемешения системы 1, Сила резания Р Рук ги}, точка приложения W {Хи,У , 2 }. Сила инерции Ф{Ф\,Ф\, Ф1}, точка приложения 0{х[ х1 x\J. Момент силы инерции Wf/V/, М Л/ш), точка приложения (У {х[, Хщ, Хщ}. Крутящий момент Л/к{Лкхш, О, 0} приложен по оси (А.Л. -Сила тяжести G {G Gy, G.-}, точка приложения - центр тяжести в системе тс {хтУтс, -зс} Величины Рк, Рук, Л-и рассчитываются по формулам (1.8.23), координаты Хи,уу z определяются заданным движением инструмента. На основании вышеприведенных данных найдем реакции в опорах системы Еш, перемещения опор и отклонения относительного движения. Для нахождения реакций в опорах сначала определим проекции вышеперечисленных сил и моментов на координатные оси Ещ и Z (см. рис. 1.8.25). Сила резания Р действует в системе Z ; Рн, Ру Рт ее проекции: 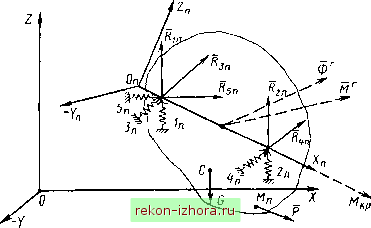 Рис. 1.8.25. Силы и моменты, действующие в координатной системе шпинделя £ш - в системе - в системе Рхш=Рх И + Рут2 + PzU Руш =РхЩ1 + Рут22 + Р,т2з; Рш = Рх п + Рутз2 + Р и- Координаты точки приложения Л/ - силы резания. Точка М расположена в системе 2 : Хк,у , z , ее проекции: - в системе У=Х \21+УчУ22+и23+У0 2 = д: Уз, -f- уу2 + -mV33 + о ; - в системе 2ш Уш =хт2,+ ут22 + 2W23 - {Хо т2, + Уо 22 + гз); = J: 3 1 + 3 32 + 233 - {Хо W3, + >о , 32 + Zq W33 ). Сила инерции действует в системе Ъ: Ф , Фц Ф , ее проекции в системе 2с: Ф! = Ф!ш 1 1 + Фи 21 + Ф1-ш 31; Фу = ФИ2 + Фи 22 + Фгш 32 ; Ф. =Ф!;ш 13 +ФП23 +Фш 33- Координаты точки приложения - силы инерции. Точка (У расположена в системе Ещ: х[, у[, , ее проекции в системе2: х = хшхх + /ут2х +z[mx +Хо ; / = x[mi2 + уут22 + z;W32 + уо; Z = x;W,3 + j;;W23 + ZWjj + Zo . Если точка Олежит на оси ОщХш, то / = х[,ти; z = X ,Й13. Ciia тяжести G приложена в системе 2з,ее проекции в системе 2 Gxui = Gjcm\i + Gjcm[2 + Gwn! Gym - G2\ + Gym2i + СуШц; Gzm - Gmn + Gmi + Gmi. Координаты точки приложения силы тяжести G - точка С. Точка С расположена в системе 2з: х,у, z\
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |