

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Пространственные размерные цепи 370 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЗАКОНОМЕРНОСТЕЙ для прямой ВМ к=к2Ш, (1.8.17) где к - угловой коэффициент прямой линии. Чтобы описать полученную в результате обработки поверхность детали, необходимо вывести уравнения относительного движения технологических баз детали и режущих кромок инструмента. С этой целью, выбрав одну из точек, принадлежащих линии режущих кромок, выводится уравнение движения этой точки. Для рассматриваемого случая удобно в качестве такой точки принять точку Л/ - вершину резца. Теперь, подставляя в выведенное уравнение движения выражение ди, получим уравнение поверхности детали, образуемой перемещением ломаной линии АМВ в координатной системе детали. Для рассматриваемого случая в целях простоты решения задачи удобнее сначала подставить в уравнение движения выражение у согласно равенству (1.8.16), а потом в равенство (1.8.17). Тогда, исключив из полученных уравнений движения лз = /i(: , > , z , 0; y=f2ix , Л, z , t); 2з = /з(л: , > , 2 , О, параметр дгн, получим уравнения поверхности в неявном виде; образованной линией AM при (р = (р: /i(W3) = 0; (1.8.18) образованной линией ВМ при (р = (р: ихг) = 0. Линия пересечения этих поверхностей представляет собой траекторию движения точки М. Из рис. 1.8.21 следует, что не все точки линии режущих кромок формируют полученную поверхность детали. Чтобы найти участок линии режущих кромок инструмента, точки которого участвуют в формировании поверхности детали, надо решить систему уравнений (1.8.18). Решив систему уравнений Уъ J = 0 при ф = ф; /2(3. >з. з) = 0 при ф = ф + 2я, 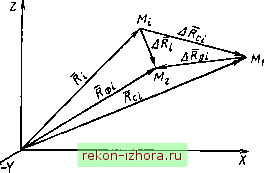 Рис. 1.8.22. Схема формирования AR детали как совокупности погрешностей статической и динамической настроек получим координаты точки А (см. рис. Г8.21) как точку пересечения двух прямых AM и ВМ, где положение AM определяется положением главной режущей кромки при ф, а положение ВМ определяется положением вспомогательной режущей кромки на оборот позже. Для того чтобы найти координаты точки В\ надо совместно решить систему уравнений /,(Хз, у, z,) = 0 при ф = ф; f2(x y z) = Q при ф = ф-2я. Теперь для каждого момента времени t можно рассчитать радиус-векторы точек А, М, В и построить получаемую поверхность детали. Для этого в уравнения поверхностей надо подставить координаты точек режущей кромки инструмента. Известно, что погрешность обработки представляет собой векторную сумму погрешностей статической и динамической настроек размерных и кинематических цепей технологической системы. Образование погрешности обработки детали в /-й точке можно представить в виде схемы, приведенной на рис. 1.8.22. В координатной системе, построенной на технологических базах заготовки, положение точки поверхности детали, заданной чертежом, определяется радиус-вектором Л,-. После осуществления статической настройки технологической системы положение вершины резца в этой же системе координат будет определяться радиус-вектором Л,.,-. Вершины В то же время Лф, = Л - ДЛд,. (1.8.20) Тогда, подставляя в равенство (1.8.19) вместо Лф, правую часть равенства (1.8.20), получим ДЛ, = Л, ± ДЛд,. В связи с изложенным, рассмотрим построение математических моделей статической и динамической настройки технологической системы. С целью упрощения математической модели за основу примем уравнение относительного движения технологических баз заготовки и вершины резца. 1.8.4.1. Построение математической модели механизма образования погрешности статической настройки Статическая настройка технологической системы заключается в установлении требуемого относительного положения режущих кромок резца относительно технологических баз заготовки и их относительного движения в условиях отсутствия рабочих нагрузок без съема материала с заготовки. Однако непосредственное измерение относительного положения режущих кромок резца и технологических баз заготовки не представляется возможным из-за отсутствия доступа к технологическим базам радиус-векторов Л, и Л, не совпадают из-за действия многочисленных факторов, т.е. появляется погрешность статической настройки Иными словами, если бы произошла обработка заготовки, то положение /-Й точки оказалось бы в точке Mi В результате последующей динамической настройки технологической системы положение вершины резца изменится на величину ДЛд, и окажется в точке Mj. Тогда после обработки заготовки фактическое положение Л/,-й точки полученной поверхности окажется в точке М2, определяемой радиус-вектором Лф а погрешность обработки AR, определится из равенства М, = Л,-Лф,. (1.8.19)
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |