

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Пространственные размерные цепи Приравняв правые части равенств (1.8.2) и (1.8.3), получим уравнение радиус-вектора г , определяющее положение точки Л/в системе I: > -04 +м -ог - oi- (1.8.4) Пользуясь формулами перехода из одной координатной системы в другую, найдем последовательно положение точки М в координатных системах L3, 1,2, Sj. С этой целью запишем формулы перехода, для чего найдем положение точки М координатной системы 2 в системе I. (рис. 1.8.12) при их параллельном положении. Уравнения координат точки Л/в системе I будут иметь следующий вид: х = Хо +х; У =Уо +У или г =7+7; где х, у\ г - координаты точки М в системе 2; xq, уо, zo - координаты точки О в системе Е. В общем случае система I может быть непараллельна системе S, тогда в формулу перехода должны быть включены углы ее поворотов. Пусть точка М задана в системе I; надо определить ее положение в системе Е. 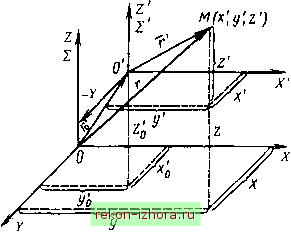 Рис. 1.8.12. Схема определения положения точки М в координатной системе L при параллельном расположении системы L Пусть система S повернута в пространстве так, что ее оси будут непараллельны осям системы I (рис. 1.8.13, а), при этом начала систем S и L совпадают. При повернутой системе S положение точки М в системе S определяется радиус-вектором F = Mr, где М - матрица поворота системы S в системе 2; F - радиус-вектор, определяющий положение точки Мв системе I. В этом случае формула перехода точки М из системы S в систему I будет иметь вид < X = cos(/ i)x + cos(/ j)y + cos(/ k)z\ Л. j-b. = cos( i /)д: 4- cos(y + cos(y /c)z; (1.8.5) z = cos()t + cos()t;)> + cos()t k)z, где cos( X со5(г y ), ,cos(/c A;) - косинусы углов (направляющие косинусы) между осями систем S и i, у, к - единичные векторы. 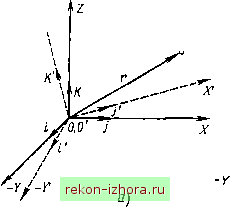
Рис. 1.8.13. Схема определения положения точки М в системе L: а - общий случай, когда V повернута вокруг трех осей ОХ, 0Y, 0Z; б - при повороте системы S вокруг оси ОХ Влияние поворота системы S на положение точки М в системе I отражено через направляющие косинусы. С целью сокращения записи введем обозначения направляющих косинусов через и,: cos(7r) = ii; cos(rj) = M,2; со5(ГГ) = и,з; cos(7V) = u2x\ cos(7J) = 22; cos(7k) = М23; С05(Г) = из,; C0S(7) = 32; С05(АТ) = Изз. Тогда формула перехода (1.8.5) будет иметь или г = Мг. Запишем формулы перехода точки М из координатной системы Х в координатную систему S при последовательном повороте системы I вокруг осей ОХ, 0Y, 0Z, при условии, что начала координатных систем Х и S совпадают. На рис. 1.8.13, б показано положение системы Г после ее повороза вокруг оси ОХ на угол ф против часовой стрелки. Уравнения координат точки Л/в системе S будут иметь следующий вид: x = x\+y0 + zQ; = хО + >< cos ф + z(- sin ф); Z = д:0 + у sin ф + z cos ф.
х = х; у = >cosф - zsinф; Z = Уsinф + zcosф. Матрица поворота системы I вокруг оси ОХ на угол ф имеет вид О О О cosф -sinф . (1.8.6) Osinф со5ф
|
|||||||||||||||||||||||||||||
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |