

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Пространственные размерные цепи Запишем уравнение движения на примере токарной обработки Пусть резец совершает поступательное движение, а заготовка врашается (рис. 1.8.9). Тогда в неподвижной координатной системе S3 заготовки резец будет совершать винтовое движение. Задача сводится к тому, чтобы определить AR в любой момент обработки. Если говорить строго, то необходимо записать уравнение движения режуших кромок лезвия, формирующих поверхность вала. Для упрощения изложения вопроса запишем уравнение движения одной из точек режущих кромок, например вершины лезвия (точка М). Согласно схеме (см. рис. 1.8.9), уравнение движения точки Мв системе будет иметь вид: У, =/2(х , У , t); 3 =/-iK >и 2и> О, (1.8.1) где д: Уз, Zj - координаты точки М в координатной системе L3 заготовки. Хи, Уи< 2 - координаты точки М в координатной системе S резца; t - па раметр движения (время, угол поворота и др.). При обработке заготовки происходит изменение относительного по ложения систем S3 и поэтому и значения х, дз, Z3 будут изменяться. 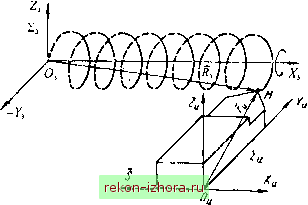 Рис. 1.8.9. Схема движения вершины резца в координатной системе заготовки Sj Чтобы записать уравнение фактического движения точки М в системе S3, необходимо в правую часть уравнения (1.8.1) в качестве аргументов включить величины, характеризующие каждый блок схемы, приведенной на рис. 1.8.4. Согласно этой схеме, нарушение относительного движения является следствием дополнительных перемешений и поворотов координатных систем эквивалентной схемы (см. рис. 1.8.8). Чтобы уравнение движения (1.8.1) отражало перемешения и повороты координатных систем I3, Ъ, S эквивалентной схемы в неподвижной системе Iq, следует в его правую часть включить характеристики, определяющие положение каждой координатной системы. Известно, что положение твердого тела в пространстве относительно неподвижной системы координат Ъ может быть определено с помощью шести параметров: трех угловых и трех линейных координат системы координат I, жестко связанной с этим телом (рис. 1.8.10). Таким образом, положение детали в системе координат I может быть определено с помощью радиус-вектора f и матрицы углов поворотов: 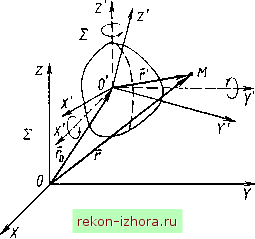 Рис. 1.8.10. Положение тела £ в неподвижной системе координате где x,y,z- координаты начала системы координат S в системе S; М(х. ф), М(у, Л/(г,е) - матрицы поворотов против часовой стрелки системы координат S соответственно на угол ф вокруг оси (УХ, на угол \/ вокруг оси ОТ и на угол 0 вокруг оси OZ. Введем в правую часть уравнения движения (1.8Л) параметры, определяющие положения каждой координатной системы эквивалентной схемы. Это выполняют с помощью формул перехода из одной системы координат в другую. В совокупности координатных систем эквивалентной схемы, где S, = Ii, 1ш = 2, = 3 и 1 = I4 за неподвижную систему координат примем L3 (рис. 1.8.11). Соединив начала координатных систем радиус-векторами, можно записать два векторных равенства: = 02 + 01 + г; (1.8.2) Л =Го4 (1.8.3) 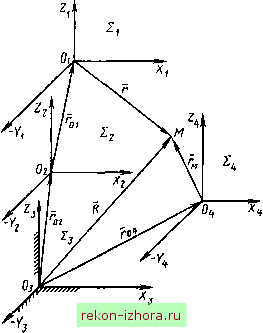 Рис. 1.8.11. Схема векторных связей координатных систем эквивалентной схемы
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |