

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 00, =d = (8.20) Действительно, главный вектор R и пара сил с моментом L лежат в одной плоскости. Представим момент пары сил в виде произведения Lq = Rd и расположим пару (R\R*) так, как показано на рис. 8.37, причем выберем R = R* = R . В результате силы R и R уравновесятся, а система сил будет эквивалентна одной равнодействующей R \ проходящей через точку О,. 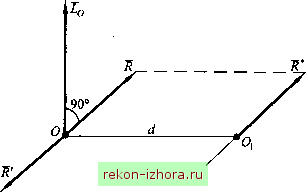 Рис. 8.37 Теперь рассмотрим систему сил, для которой второй инвариант LqRO.B простейшем виде такую систему можно представить совокупностью векторов Lq и R, расположенных на одной линии и называемых динамическим винтом (рис. 8.38). К одной силе (или одной паре сил) данную систему сил привести нельзя. Докажем, что если LqRO, причем в общем случае вектор Lq не параллелен вектору R , то система сил приводится к динамическому винту. Разложим Lq на две составляющие: Z на- правленную вдоль R, и перпендикулярную R (рис. 8.39). Вектор L2 представим в виде пары сил R, R\ равных по модулю силе R , как это показано для вектора Lq на рис. 8.37, т. е. L2 =Rd .Силы R и R взаимно уравновешиваются, а вектор Z, как свободный перенесем в точку . В результате имеем динамический винт R\L, проходящий не через точку О, а через точку (Э. Прямая, вдоль которой (через точку ) направлен вектор R, называется осью динамического винта. 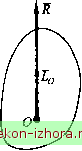  Рис. 8.38 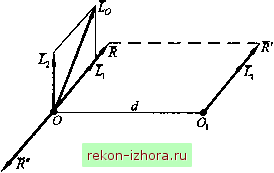 Пример 8.7. На твердое тело, выполненное в виде куба с длиной ребра а (рис. 8.40), действует система, состоящая из девяти равных по модулю сил (А: = 1,..., 9). Привести систему сил к вершине куба - точке О и упростить ее. 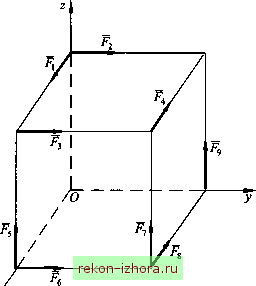 Рис. 8.40 Решение. Построим систему координат с началом в точке О и определим проекции на оси координат главного вектора R и главного момента Lq : к=9 к=9 к=9 K=Y.kr=-fl Ry=F,y3F; /?,=2fi,=3F; =1 =1 h k=9 *=9 L,=MAFk)-0; I,=A/,(f;) = -2Fa; L, =JM,(F,) = 4Fa. k=\ k=l k=\ Найдем модули главного вектора и главного момента RrI-rI-R] =F ; Второй инвариант системы сил LoR = L,R + LyRy + LR = bFa .
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |