

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика изменяются лишь две координаты: и угол ф, причем их изменения пропорциональны одно другому, т. е. Тогда движение тела соответствует одностепенному винтовому движению с шагом винта Н, поскольку за полный оборот тела (ф = 271) точка А перемещается вдоль оси Oz на расстояние Н (рис. 5.2). Закон такого винтового движения задается лишь одной функцией, например ф = /(/). Взаимосвязь между исходными обобщенными координатами может иметь более сложный вид, например при движении тела по поверхности с непрерывным контактированием. Аналитическое выражение такой зависимости определяется формой тела и формой поверхности. Для простоты рассмотрим случай движения круглого тонкого диска - монеты радиусом R по плоскости стола (рис. 5.3). Расположим оси Ох и Оу системы в опорной плоскости, а в качестве точки А системы 2 возьмем центральную точку диска, при этом ось AZ системы 2 направим перпендикулярно плоскости диска. При непрерывном контактировании тел значение координаты z будет зависеть от угла наклона плоскости монеты к плоскости стола: z =Rsin(K,k) = RsmQ, где 6 - угол нутации в группе углов Эйлера, задающих пространственную ориентацию осей системы 5*2 относительно системы Sq . Так как переменные параметры z и Q оказались взаимозависимыми, то в данном случае движения диск не может иметь более пяти степеней свободы. 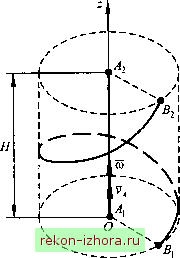 Рис.5.2 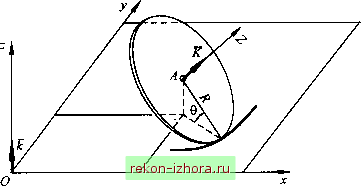 Рис. 5.3 Вопросы кинематики движения тел произвольной формы по поверхности без или со сколйЬкением в точках контакта выходят за рамки данного учебника. 5.2. Траектория произвольной точки тела Покажем, как рассчитать траекторию произвольной точки тела, если уравнения его движения записаны в форме (5.2). Пусть такой точкой является точка 5, находящаяся от точки А на расстоянии /. Радиус-векторы точек В и А в системе Sq связаны соотношением г,=г,+АВ. (5.3) Вектор АВ имеет различные проекции на оси координат двух систем 0 и в 0 АВ = R =[lJy,LY, а в S2 АВ = р = = [1хJzV причем 1у, 1у, I2 остаются постоянными при движении тела. На основании формулы (В.71) запишем связь проекций АВ на оси координат систем .Sq и .S2: Л=Ар, (5.4) где А - матрица, транспонированная к матрице А направляющих косинусов углов между осями систем Sq, .S, и.52, элементы которой, согласно (4.3), могут быть выражены через углы Эйлера, т.е. A = A[v/(0,e(0,9(0]. Соотношение (5.3) с учетом (5.2) и (5.4) позволяет получить в явном виде уравнения движения точки В на заданном интервале изменения времени t: г в = (Oi + у а (OJ + {t)k + А [м/(0,6(0, Ф(0](/х I + lyJ + lzK). Представленное уравнение можно считать параметрической формой задания траектории точки В относительно системы координат 0. 5.3. Скорость произвольной точки тела Отметим, что по уравнениям движения (5.2) можно рассчитать проекции вектора скорости точки А на оси Sq : а=а ау=Уа\ Az=A а также проекции вектора угловой скорости сферического движения тела относительно системы 5, на оси системы координат 2 (см. формулы (4.8)). Вектор ш и его производную по времени s = со будем называть соответственно векторами угловой скорости и углового ускорения тела в общем случае его движения. Продифференцировав по времени уравнение (5.3), получим Так как АВ является вектором постоянного модуля, его производную по времени можно вычислить по формуле Эйлера (4.6): АВ = (охАВ. Тогда v=v+cox5. (5.5) При известном законе движения тела (см. (5.2)) формула (5.5) позволяет рассчитать скорость произвольной точки В тела для любого момента времени на заданном интервале времени.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |