

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика установленного в упругих опорах, относительно корпуса; движение груза, подвешенного на упругом тросе, при движении стрелы подъемного крана. Положение любой точки твердого тела, а следовательно, и положение самого твердого тела в системе отсчета движения Sq определяется положением каких-либо трех фиксированных его точек, не лежащих на одной прямой, ибо такие точки позволяют построить в теле базисную систему S с началом в одной из них. Поскольку в системе S координаты любой точки тела постоянны, то движение точек тела является следствием движения самой системы S, т. е. выбранных базисных точек. Последнее доказывает, что характеристики движения произвольной точки полностью определяются движением трех выбранных базисных точек тела. Поэтому при изложении формулировок определений частных случаев движения твердого тела достаточно указывать свойства геометрических ограничений лишь для его базисных точек. Например, движение тела будет поступательным относительно системы Sq , пока хотя бы два из трех отрезков, соединяющих три базисные точки, не изменяют своей ориентации в Sq . Из девяти координат трех базисных точек тела лишь шесть могут быть независимыми, поскольку длины трех отрезков между этими точками твердого тела должны сохраняться. Поэтому положение тела в общем случае движения задается шестью независимыми переменными параметрами q . q, называемыми обобщенными координатами тела. Это означает, что тело имеет шесть степеней свободы относительно системы Sq, Большего числа степеней свободы твердое тело как самостоятельный объект изучения никогда не имеет. Возможны различные варианты выбора обобщенных координат. Для наглядности восприятия в качестве последних обычно выбирают геометрические параметры - прямолинейные или криволинейные координаты и углы. Типовой вариант выбора обобщенных координат для общего случая движения твердого тела показан на рис. 5.1. Тело здесь изображено в виде прямоугольного параллелепипеда, который надо воспринимать как некоторый кусочек тела произвольной формы. Помимо основной системы 0 отсчета движения здесь используются две вспомогательные подвижные системы 5, и некоторой точкой тела, например А, связано начало осей системы .S направления которых всегда совпадают с направлениями одноименных осей исходной системы При таком условии система 5, движется поступательно относительно системы Sq. Положение системы 1 относительно Sq может быть задано, например, с помощью декартовых координат точки А. 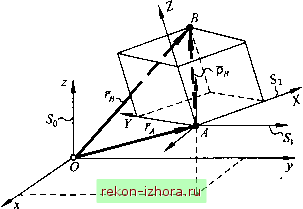 Рис. 5.1 Система с началом в точке А жестко связана с телом. Поэтому любое нетривиальное движение тела (и осей системы 2) относительно системы .S, будет сферическим по определению этого вида движения. Пространственная ориентация осей системы S2 относительно системы .S, может быть задана, например, тремя углами Эйлера. Три декартовы координаты , у, точки А и три угла Эйлера v/, 6, ф являются обобщенными координатами тела в системе Sq . Представленный вариант обобщенных координат не является единственным. Начала систем 5, и можно совместить с любой точкой тела. Вместо декартовых координат точки А можно использовать, например, ее цилиндрические координаты, а вместо углов Эйлера - иную систему углов. Совокупность уравнений qj=fjit) U = W, (5.1) определяющих зависимость обобщенных координат тела от времени, называют законом движения тела, или уравнениями его движения, на некотором интервале времени (t, 2). Например: 9i==/i(0, Я2=Уа=/2(0. Чъа-Ш. Информация, заключенная в уравнениях движения (5.2), является исчерпывающей для расчета любых кинематических характеристик движения отдельных точек и пространственной ориентации тела. Получение имформации об общем случае движения тела в заданных физических условиях в виде (5.1) обычно составляет главную цель задач динамики твердого тела. Любой вид движения твердого тела можно рассматривать как частный случай общего движения. Нетрудно убедиться, что частным случаям законов изменения обобщенных координат твердого тела (5.2) отвечают частные виды движений твердого тела, в том числе и покой. Так, если углы Эйлера на некотором интервале времени остаются постоянными, то движение тела соответствует определению поступательного движения. Аналогично, если координаты точки А остаются постоянными, то движение тела соответствует определению сферического движения. Если же остаются постоянными координата и два угла Эйлера v/, 9(0 = 0), то движение тела соответствует определению плоского движения, параллельного плоскости осей Оху системы . Таким образрм, фиксируя некоторые обобщенпные координаты, можно генерировать различные частные случаи движения тела с меньшим числом степеней свободы. Другой вариант сокращения числа степеней свободы твердого тела - установление какой-либо функциональной зависимости между двумя или несколькими исходными обобщенпными координатами. Например, будем считать, что при движении тела
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |