

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Учитывая (4.4), найдем, что соотношение, устанавливаюш;ее скорость точки тела в случае его сферического движения, принимает вид формулы Эйлера* v = c5xr. (4.6) Модуль скорости точки тела у = а)Л, где h - кратчайшее расстояние от рассматриваемой точки тела до мгновенной оси вращения (рис. 4.9). Следовательно, как и при вращении тела вокруг неподвижной оси, при вращательном движении вокруг неподвижной точки скорости точек тела в данный момент ере-мени пропорциональны расстояниям от точек до мгновенной оси вращения тела. Мгновенная /траектория точки 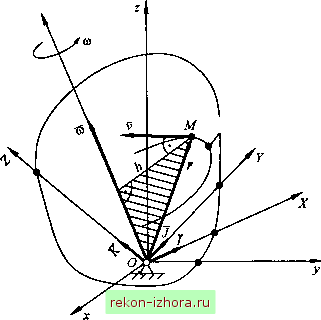 Рис. 4.9 Вектор скорости точки тела перпендикулярен плоскости, в которой находятся векторы с5 и г (заштрихованная плоскость * Для случая вращения твердого тела вокруг неподвижной оси формула Эйлера выведена в гл. 2. на рис. 4.9), а следовательно, перпендикулярен h и направлен по касательной к мгновенной траектории точки в сторону дуговой стрелки углЪвои скорости тела, вращающегося вокруг мгновенной оси. Найдем вектор v через его проекции на оси подвижной системы координат OXYZ. Представив правую часть равенства (4.6) в виде определителя, ползшим I J К ®Х ®Z где I, J , К - орты подвижной системы координат OXYZ\ , сОу, ( 2 - проекции вектора мгновенной угловой скорости на подвижные оси координат; X, У, Z - координаты точки тела в подвижной системе координат. Развернув этот определитель по элементам верхней строки, найдем V = (a)j.Z - ©2 J ) -ь (coz - -ь (СО; У - X)Z. Таким образом, проекции скорости v точки тела на координатные оси подвижной системы координат OXYZ будут равны -Z-iSY\ =С02Х ~C0;Z; (4.7) Установим теперь проекции вектора ю, определяемого соотношением (4.5), на оси той же подвижной системы координат oxyz (рис. 4.10). Вектор ук угловой скорости прецессии разложим предварительно на две взаимно перпендикулярные составляющие, одна из которых совпадает с осью 0Z и равна \j/cos6, а вторая, равная \j/sin6, принадлежит плоскости OXY и совпадает с вспомогательной осью OL, составляющей с осью OY угол ф. Тогда, проецируя последнюю составляющую на оси плоскости, которой она принадлежит, находим = \j/ sin 0 sin ф 7 4- \j/ sin 0 cos Ф 7 + \j/ cos 0 . 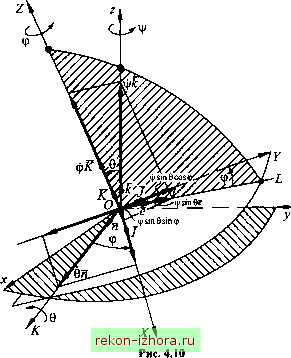 Вектор Qn угловой скорости нутации, совпадая с линией узлов ОК, располагается в плоскости OXY подвижной системы координат и составляет с осью ОХ угол ф (см. рис. 4.10). Следовательно, для него можно записать 6 =6со8ф/-6siiT<pJ. И, наконец, вектор угловой скорости собственного вращения, совпадающий с осью OZ тела, будет равен ф . Составим вспомогательную таблицу проекций векторов, входящих в соотношение (4.5) на оси подвижной системы координат:
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |