

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 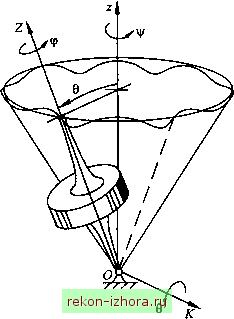 Рис. 4.3 4.2. Матрица направляющих косинусов. Траектория точки тела Пусть X,Y,Z- координаты произвольной точки Мтела в подвижной системе координат 5, жестко связанной с ним, а х, у, Z - ее же координаты в неподвижной системе координат Sq . Очевидно, что при движении тела координаты X, 7, Z остаются постоянными в отличие от координат дс, у, z. Полагая, что закон движения тела имеет вид (4.1), установим зависимость координат х, у, z от времени в явном виде: х = x(t), у = y(t), Z = z(t), что позволит судить о закономерностях движения точки М относительно неподвижной системы Sq . В отношении вектора ОМ воспользуемся формулой (В.72), устанавливающей взаимосвязь проекций вектора на оси двух систем координат, г=Ар, (4.2) где г = [х, у, zY, р = [X, 7, zy - проекции вектора ОМ на оси координат систем Sq и S соответственно; А - матрица, транспонированная к матрице направляющих косинусов А (3 х 3), задающей преобразование поворота от осей системы Sq к осям системы S. Получим выражение А = А(/), основываясь на взаимном положении четырех систем Sq, S, S2,S(рис. 4.4), из которых системы 5, и 2 выполняют вспомогательную роль. Переход от осей системы Sq к осям системы S осуществляется поворотом на угол v; вокруг оси Oz системы Sq , от осей системы S к осям системы 2 - поворотом на угол 6 вокруг оси Ох, системы 5, и от осей системы .2 к осям системы S - поворотом на угол ф вокруг оси 02 системы S2. Каждому из трех преобразований систем координат соответствуют матрицы направляющих косинусов А, Aq , Ар:
(Здесь для краткости записи тригонометрических функций sin и cos углов Эйлера вместо самих функций указаны лишь первые буквы их названий.) Тогда* с1/сф-81;с08ф 81/сф + С1/с08ф зОзф -С1;8ф-81;с6сф -81;8ф + С1/с6сф 80сф sv/s6 -cv/s9 сЭ (4.3) При заданном законе сферического движения (4.1) выражение (4.3) позволяет сформировать зависимость Ai,A(t), опреде- * Следует обратить внимание на порядок расположения сомножителей в произведении матриц AAqA, , поскольку он влияет на результат перемножения. ляющую искомый закон движения и траекторию выбранной точки тела: г (/) = (Ор . 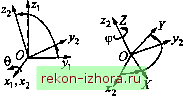 Sq -Т aSj aS2 aS 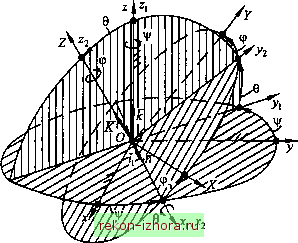 Рис. 4.4 4.3. Мгновенная ось вращения. Аксоиды Положение твердого тела в пространстве определяется положением любых трех его точек, не лежащих на одной прямой. При неподвижной точке О положение тела определится положением любых двух других: точек, не лежащих на одной прямой с точкой О, Перемещение твердого тела с неподвижной точкой
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |