

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика тяжести С. Пусть система координат CXYZ (рис. 4.1), жестко связанная с кораблем, в исходном положении совпадает своими осями с осями неизменного направления неподвижной системы координат Cxyz. Тогда, если ось СХ направлена от кормы к носу корабля, ось CY- к его левому борту, а ось CZ образует с ними правую систему координат, то углы Крылова будут определены следующим образом: угол дифферента \/ - угол между осью Сх и линией СК пересечения координатных плоскостей Cxz и CAT; угол рыскания ф - угол между линией СК и осью СХ и, наконец, угол крена О - угол между осью CZ и линией СМ пересечения плоскостей Cxz и CZy, Зная эти углы для каждого момента времени, можно всегда найти положение системы координат CXYZ, а следовательно, и положение тела (корабля), скрепленного с ней, относительно неподвижной системы координат Cxyz. 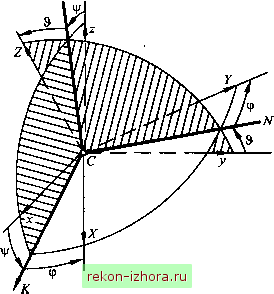 Рис. 4.1 В тех случаях, когда угловая скорость вращения в одном направлении значительно больше угловых скоростей вращений в двух других направлениях (генераторы, моторы, турбины, гироскопы), положение тела, как правило, определяется углами Эйлера: углом прецессии , углом нутации 6, углом собственного вращения ф. Чтобы задать эти углы, представим себе твердое тело, вращающееся вокруг неподвижной точки О (рис. 4.2). Введем неподвижную систему координат Oxyz, имеющую начало в точке О. Жестко свяжем с телом вторую, подвижную систему координат OXYZ с началом в той же точке. Чтобы определить положение твердого тела в неподвижной системе координат Oxyz, достаточно определить в ней положение неизменно связанной с телом подвижной системы координат OXYZ. 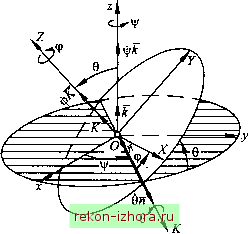 Рис. 4.2 Линию ОК пересечения координатных плоскостей Оху (на рис. 4.2 изображена в виде заштрихованного овала) и QAT (ограничена белым оралом) назовем линией узлов. Тогда угол прецессии v; определяет положение линии узлов ОК относительно неподвижной координатной оси Ох. Для изменения этого угла тело должно вращаться вокруг неподвижной оси Oz, называемой осью прецессии. Угол нутации 6 определяет положение подвижной оси oz относительно неподвижной Oz и равен углу между этими осями. Изменение угла 0 сопровождается вращением тела вокруг линии узлов ОК, называемой осью нутации. Наконец, угол собственного вращения ф характеризует вращение тела вокруг оси OZ, называемой осью собственного вращения. В подвижной плоскости OXY это угол между линией узлов ОК и подвижной осью ОХ. Положительное направление отсчета углов Эйлера v/, 0 и ф противоположно направлению движения часовой стрелки, если смотреть на поворот тела с положительньк направлений осей Qz, OK и OZ соответственно. Углы Эйлера являются независимыми параметрами, характеризующими положение тела с одной неподвижной точкой относительно неподвижной системы координат. Они широко используются в теории гироскопов. Движение гироскопа - симметричного тела, имеющего неподвижную точку на своей оси симметрии, в общем случае можно представить состоящим из трех движений (рис. 4.3): вращения с большой угловой скоростью вокруг оси симметрии (оси собственного вращения), при котором меняется угол собственного вращения ф; вращения вместе с осью симметрии вокруг неподвишюй оси Oz (оси прецессии), при котором меняется угол прецессии v/, и движения оси симметрии гироскопа относительно линии узлов (Ж, в результате которого меняется угол нутации 0 между осями 0Z и Oz. При прецессионном движении ось симметрии гироскопа 0Z описывает волнистую коническую поверхность, если же угол нутации 0 не меняется, то описываемая ею поверхность будет правильной конической. При движении твердого тела около неподвижной точки углы v/, 0, ф являются некоторыми функциями времени: v/=/i(0;e=/2(0;9=/3(0. (4.1) Эти выражения называются уравнениями вращения твердого тела вокруг неподвижной точки. Бели уравнения (4.1) задань!, то положение твердого тела относительно неподвижной системы координат Oxyz может быть определено для любого момента времени.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |