

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Здесь -- = , -- = - ускорения точек В и A относи-dt dt тельно неподвижной системы координат; -ва - ускоре- ние точки В при вращательном движении плоской фигуры вокруг подвижной оси, проходящей через полюс А перпендикулярно плоскости фигуры, или просто вокруг полюса. Таким образом, ВА-ВА . (3.6) т. е. ускорение какой-либо точки тоской фигуры при плоском движении равно векторной сумме ускорения полюса и ускорения этой точки при вращательном движении плоской фигуры вокруг полюса. Учитывая, что v = ю х 5, найдем dBA d- -. d(0 - dAB (3.7) = 8х5н-©х(шх АВ), d где -- = 8 -угловое ускорение тела при плоском движении. dt Оценивая слагаемые в соотношении (3.7), отмечаем, что ускорение точки а при вращательном движении плоской фигуры вокруг полюса, как и в случае вращения тела вокруг неподвижной оси, состоит из касательной и нормальной со-ставляющт: = 8x5, ад =шх(юх5) = юхудд, (3.8) модули которых <hA = гАВ, al=(oAB. (3.9) Касательное ускорение направлено перпендюдлярно отрезку АВ в сторону, указанную дуговой стрелкой 8 (рис. 3.10, а). Нормальное ускорение а направлено от точки В к полюсу. Таким образом, ВА =7Кл)+Кл)=е-ьсо\ (ЗЛО) Обозначив угол между ускорением а и отрезком АВ через а, найдем ВЛ (О (3.11) Угол а постоянен для заданных со и 8, т. е. в данный момент времени, и не зависит от положения точек тела. 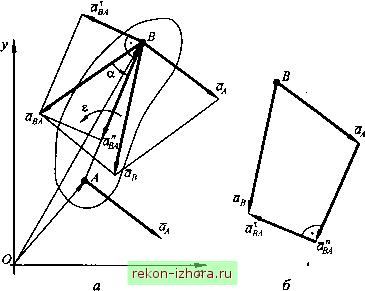 Рис. 3.10 Как и при определении скоростей точек движущейся плоской фигуры, в необходимых случаях рассматривают план ускорений точек фигуры. На рис. 3.10, б построен в масштабе многоугольник ускорений. Пример 3,3, Колесо радиусом R катится по неподвижной прямой (рис. 3.11). Известны ускорение центра колеса а, угловая скорость со и угловое ускорение е . Определить в данный момент времени ускорения точек Л, В и Р, расположенных на концах вертикального и горизонтального диаметров обода колеса. 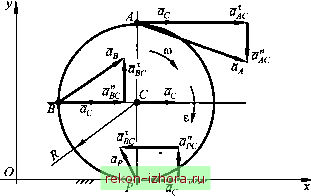 Рис. 3.11 Решение. Примем за полюс точку С, ускорение которой задано. Тогда, согласно (3.6) и (3.8), ускорение точки А .2 гл 1 где ale =гСА = гЯ ; = со = со/?. Ускорение ale перпендикулярно отрезку СА и направлено в сторону, указанную дуговой стрелкой е , а а направлено от точки А к полюсу С. Построив для точки А план ускорений, входящих в правую часть исходного равенства, найдем искомый вектор как вектор а (см. рис. 3.11). Его модуль a=yl(aca\c)Halc) = (с+coV . Рассуждая аналогично, находим для точек ВиР соответственно: а1с=гСВ = гК; ас = (ОСВ = (ОR ; as =у1(ас + вс) + кс) = Vc +со) а;с\ = гСР = гН; арс = (ОPC = R; apiac-alcf+iacf = д/( с+coV . В частном случае, если а = а = е/?, то ар= (OR = . Этот результат возможен, очевидно, когда колесо катится по неподвижной прямой без скольжения, то есть когда МЦС колеса совпадает с точкой контакта его с основанием - точкой Р. Таким образом, ускорение точки Р колеса при его качении по неподвижному основанию не может быть равно нулю, поскольку нормальная составляющая ускорения а pc = (О/? имеет ненулевое значение.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |