

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика некоторой неподвижной плоской линии (рис. 3.6, д). Например, качение без скольжения колеса по неподвижной прямой линии или одного колеса по другому неподвижному колесу. В таких случаях МЦС плоской фигуры находится в точке ее контакта с опорой, скорость которой равна нулю. 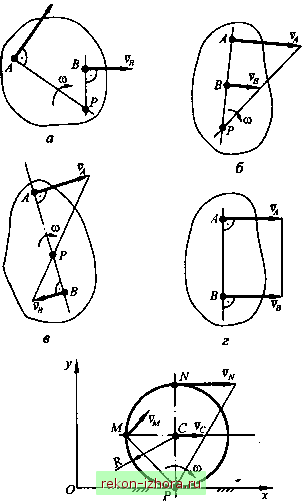 Пример 3.1. Колесо радиусом r (см. рис. 3.6, д) катится без скольжения по неподвижной прямой; скорость центра . Используя понятие МЦС, определить скорости точек МиМ обода колеса. Решение. Поскольку колесо катится без скольжения, его МЦС находится в точке р контакта обода с неподвижной прямой. Тогда, в соответствии с (3.5), угловая скорость колеса PC r а направление его вращения определится направлением вектора по отношению к МЦС (направление вращения колеса совпадает с направлением движения часовой стрелки). Теперь, так как РЛ/ = л/2/?,а pn = 2r,to vj =o)PM = V2vc; Vj=:(dPN = 2vc . Векторы скоростей точек MnN колеса перпендикулярны отрезкам прямых, соединяющих эти точки с МЦС, и направлены в сторону вращения колеса вокруг МЦС (см. рис. 3.6, д). 3.5. Мгновенный центр вращения. Центроиды На рис. 3.6 видно, что скорости точек сечения тела при плоском движении распределены в каждый момент времени так, как если бы движение сечения тела представляло собой вращение вокруг МЦС. Поэтому МЦС называют мгновенным центром вращения. Ось Pz, вокруг которой в данный момент времени происходит вращение тела, перпендикулярную к его сечению и проходящую через МЦС - точку Р, называют мгновенной осью вращения. Мгновенный центр вращения при плоском движении тела меняет свое положение как на неподвижной плоскости, в которой движется фигура, так и на связанной с ней подвижной. Геометрическое место мгновенных центров вращения на неподвижной плоскости называют неподвижной центроидощ а геометрическое место этих же центров на подвижной плоскости, связанной с движущейся фигурой, - подвижной центроидой. Например, при качении диска по плоской кривой без скольжения (рис. 3.7) неподвижной центроидой является кривая по которой катится диск, а подвижной - окружность L диска. В каждый момент времени подвижная и неподвижная центроиды 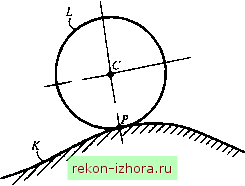 Рис. 3.7 имеют общую точку касания Р, скорость которой равна нулю. Эта точка является мгновенным центром скоростей диска. Таким образом, . при действительном Овижении плоской фигу ры подвижная центроида катится без скольжения по неподвижной. Если вместо движения плоской фигуры рассмотреть плоское движение твердого тела, то неподвижная и подвижная центроиды будут для него неподвижной и подвижной цилиндрическими поверхностями. Теория центроид нашла широкое применение в специальных курсах кинематики механизмов, в теории механизмов и машин при профилировании зубчатых колес. Рассматривая в качестве примера движение линейки эллипсографа (рис. 3.8), убедимся, что оно тождественно движению окружности Z, катящейся без скольжения внутри неподвижной окружности К вдвое большего радиуса, при котором точки В и А первой окружности движутся соответственно по горизонтальному и вертикальному диаметрам второй (см. рис. 3.8). В самом деле, проведя перпендикуляры к направлениям скоростей точек А и В эллипсографа, найдем МЦС - точку Р, Очевидно, что на неподвижной плоскости Оху разным положениям линейки АВ соответствуют разные положения центра Р, но при этом ОР остается постоянным и равным Afi. Следовательно, еподвижная центроида - это окружность К, описанная из центра О радиусом, равным АВ. Положение центра Р в процессе движения м?а-низма меняется и относительно линейки АВ, но расстр5(ние между серединой линейки С и центром Р остается постоянны] И! равным CP = ABJ2. Таким обром, окружность L с радиусом ABjl и центром в точке С будет подвижной цснтроидой.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |