

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Формула (2.1) называется векторной формулой Эйлера. Численное значение (модуль) скорости точки тела при этом определится как модуль соответствующего векторного произведения, т. е. CDxr = a)rsin(Q,r) = a)A . Скорости точек при вращении вокруг неподвижной оси направлены по касательной к окружности радиусом h в соответствии с направлением угловой скорости тела. Направление вектора V можно определить, исходя из свойств векторного произведения (2.1). Ускорение точки А тела dv dnSxr) dlo dr а =-= --- =-хг + сох-. dt dt dt dt В последнем выражении d lo/dt = 8, dr/dt = v . Следовательно, a = 8xF+©xv. (2.2) Слагаемые в правой части выражения (2.2) представляют собой касательную (тангешщальную) a=sxr и нормальную а =юху = юх((охг) составляющие ускорения точки. Действительно, направление , исходя из векторного произведения 8 X г , будет определено как направление вектора, касательного к окружности радиусом h в точке А, ahipF. На рис. 2.6 видно, что это направление также соответствует направлению углового ускорения тела. Модуль касательного ускорения точки в данном случае равен = 8г sin(8, r) = sh. (2.3) Вектор а всегда направлен по нормали к траектории точки А в сторону ее вогнутости (к оси вращения тела, перпендикулярно к ней). Модуль нормального ускорения точки а I = а = I ю X VI = соV sin(7r/2) = со А . (2.4) Полное ускорение точки тела, вращающегося вокруг неподвижной оси, а=а +а. Вектор а лежит в плоскости, церпенди-кулярной оси вращения тела (см. рис. 2.6), а его численное значение (модуль) определяется по формуле а = а +al {zhf +(a)A) =Ws +0) . (2.5) Таким образом, можно сделать вывод, что модули скоростей и ускорений точек тела, вращающегося вокруг неподвижной оси, прямо пропорциональны кратчайшему расстоянию от них до оси вращения, причем, чем дальше находится точка от оси вращения, тем больше ее скорость и ускорение. Пример 2.L В механизме, изображенном на рис. 2.7, связь тел 7 и 2 с неподвижным основанием осуществляется с помощью цилиндрических шарниров О и (9 а тела 3 с телами / и 2 с помощью цилиндрических шарниров А vi В соответственно. Тело 4 перемещается в вертикальных направляющих М и N и не проскальзывает относительно тела 2 в точке Е. Известно, что ОАОВ- = L = 0,2m, ОО, = 5 = й = 0,4м , 5D = e = 0,5M, /? = 0,5L, /JlD. Движение стержня 1 задается уравнением изменения его угла поворота вокруг оси Oz, проходящей через точку О перпендикулярно плоскости чертежа в виде Ф(0 = -с/ -71, где Z> = 271 рад/с; с = 37с/4 рад/с; t - время в секундах. Для момента времени /, = 1 с определить угловые скорости и угловые ускорения тел 7 и 2, а также скорости и ускорения точек /I, D , £ и тела 4, Все найденные кинематические параметры движения тел и точек показать на чертеже (включая траектории точек AviD), Решение. В рассматриваемом механизме тела 7 и 2 совершают вращательное движение (их неподвижные оси вращения совпадают с осями цилиндрических шарниров (9 и (9, соответственно). Тело 3 совершает поступательное движение (линия, проходящая через точки А vi В, все время остается вертикальной, а линия, проходящая через точки BviD, -горизонтальной). Тело 4 также совершает поступательное движение, перемещаясь в вертикальных направляющих. Проекции угловой скорости и углового ускорения тела 7 на ось вращения Oz найдем по формулам 0) = ф = >-2с/; Е, =ф = -2с. гт , 71 тс рад Зя рад При / = I с ф = - рад; С0, = - --; е., =---z-, а модули угловой ско- 4 * 2 с * 2 с , я рад 371 рад рости и углового ускорения тела 7 со, = - --; £ = - ~р. 2 с 2 с Направление угловой скорости тела 7 показано на рис. 2.7, а дуговой стрелкой, совпадающей по направлению с дуговой стрелкой, указывающей положительное изменение угла ф, так как ю, > О; дуговая стрелка углового ускорения, для которого Е < О, имеет противоположное направление. Углы поворота тел 7 и 2 в их вращательных движениях одинаковы {OA и ОВ являются противоположными сторонами подвижного параллелограмма ОАВО), так что угловая скорость и угловое ускорение тела 2 идентичны анаю-гичным параметрам тела / (= ю,; 83 = £). 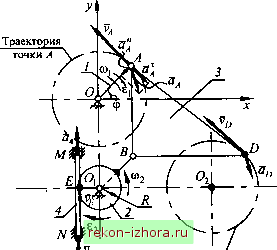 х а Траектория > точки D  Рис. 2.7 Для гочки л, как точки, прина;длежащей телу /, совершающему вращательное движение, =а),/. = (71/2)0,2 0,314м/с. Вектор vlOA и направлен в соответствии с направлением дуговой стрелки угловой скорости тела / (см. рис. 2.7, а). Ускорение точки А а=а] . Вектор а]±ОА , его направление соответствует направлению углового ускорения тела /, а модуль =с,Л = (37с/2)0,2 0,942м/с. Нормальная составляющая ускорения а направлена из точки А к точке (9, a=(dfOA = (izllf 0,2 0,493 м/с. Полное ускорение точки А расположено на диагонали прямоугольника, построенного на
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |