

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика а)=а) = а) = ф . Единица измерения угловой скорости в СИ - радиан в секунду (рад/с). 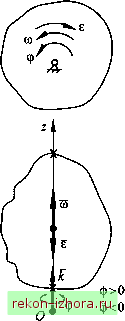 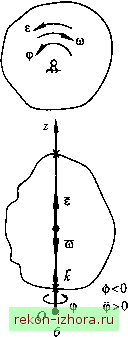 Рис. 2.5 Изменение угловой скорости тела во времени характеризуется его угловым ускорением. Угловым ускорением тела называется первая производная от угловой скорости или вторая производная по времени от угла поворота вокруг неподвижной оси: dt dp- где ф - скалярная алгебраическая величина. Как векторную величину угловое ускорение можно определить так: dt Проекция углового ускорения на ось вращения Oz =sit =ф, т. е. она равна угловому ускорению тела. Положительные направления отсчета ф, ф, ф и оси Oz соответствуют правой декартовой системе координат. Значение (модуль) углового ускорения Единица измерения углового ускорения в СИ - радиан на секунду в квадрате (рад/с ). На чертеже угловое ускорение условно изображают дуговой стрелкой, направленной при ф > О так же, как и стрелка, задающая положительное направление отсчета угла ф, и противоположно при ф < О. Угловое ускорение можно также изображать в виде вектора, расположенного на оси вращения и совпадающего по направлению с осью вращения Oz при = ф > О или направленного в противоположную сторону при 8 = ф < О (см. рис. 2.5). Векторы ю и 8 являются скользящими векторами, расположенными на оси вращения тела и не имеющими на ней конкретной точки приложения. Вращательное движение называется ускоренным, если производная от модуля угловой скорости положительна (dG)/dt>0), и замедленным, если эта производная отрицательна (d(o/dt < О). Эту характеристику можно дать также исходя из знака скалярного произведения юё: при ю-8 = а)8=фф>0 вращательное движение будет ускоренное, а при с5-8 = о[)8=фф<0 - замедленное; при 8(0 = 0 тело вращается равномерно, в этом случае (О = const. При вращательном движении твфдого тела траектории всех точек этого тела являются 01фужностями, лежащими в плоскостях, перпендикулярных оси вращения. Центры всех этих окружностей лежат на оси вращения, а радиусы равны 1фатчайшему расстоянию от этих точек до оси вращения. На рис. 2.6 для точки А тела, вращающегося вокруг неподвижной оси Cfe, показана ее траектория - окружность радиусом А, а также единичные векторы х, , 6 естественной системы осей, причем вектор бинормали b направлен так же, как единичный вектор к на оси Oz. Запишем радиус-вектор г этой точки, проведенный из точки О на оси вращения г = 00\+ОА, где 00\=00к; OA = -hn, причем 00\ = const. Скорость точки А определим в виде v= = -h-. Согласно правилу дифферешщрования вектора dt dt постоянного модуля (В.87) в данном случае -= -фх, так что X Л: = X (-А ) = V = Афх.Поскольку x = xZ>= xA:,Tov = = фЛ X {OOi к - Ш). В итоге получаем V = г = с5хг . (2.1) 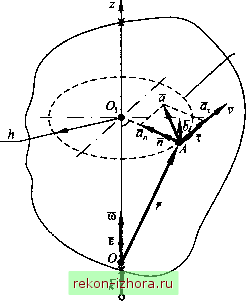 Траектория точки А
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |