

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика также равны нулю, поскольку в положении равновесия потенциальная энергия имеет экстремум; четвертые и последующие члены отбрасываем в силу предположения о малости колебаний. Тогда Обозначим z- через cj и назовем их квазиупругими J и л 1=1 7=1 dqidqj коэффициентами, причем Су = . Окончательно имеем n(q ...,q )=\±±cyq,qj, (19.80) Т. е. потенциальная энергия представляет собой квадратичную форму обобщенных координат. Выясним, в каком случае положение равновесия колебательной системы будет устойчивым. Согласно теореме Лагранжа, достаточным условием устойчивости положения равновесия консервативной системы является наличие в нем локального минимума потенциальной энергии. Выше было принято, что потенциальная энергия в положении равновесия равна нулю. Следовательно, для устойчивости положения равновесия достаточно, чтобы в некоторой окрестности положения равновесия она была строго больше нуля и обращалась в нуль только при всех нулевых значениях обобщенных координат. Другими словами, достаточно, чтобы квадратичная форма (19.80) была положительно-определенной. В соответствии с критерием Сильвестра, для того чтобы квадратичная форма была положительно-определенной, необходимо и достаточно, чтобы все главные диагональные миноры матрицы коэффициентов квадратичной формы были строго больше нуля. Запишем в соответствии с (19.80) матрицу коэффициентов квадратичной формы (19.81) nl п2 Тогда, в соответствии с теоремой Лагранжа и критерием Сильвестра достаточное условие устойчивости положения равновесия консервативной колебательной системы имеет вид С\л Сю ... Ci, Си >0; >0; -12 С22 >0. Поскольку всегда можно изменить нумерацию обобщенных координат и любую из них сделать первой, то очевидно, что все элементы матрицы (19.81), стоящие на главной диагонали, должны быть строго больше нуля: с >0 (/ = 1,2,...,п). Для анализа устойчивости положения равновесия при наличии диссипативных сил можно так же, как и в случае системы с одной степенью свободы, воспользоваться теоремами Кельвина. Пример 19.7. Определить, при каких значениях жесткости пружины с положение равновесия системы, состоящей из двух связанных между собой пружиной математических маятников (рис. 19.26), будет устойчиво. Решение. Изменение потенциальной энергии системы при отклонении от положения равновесия (ф = 0, \/ = 0) будет результатом подъема груза левого маятника на высоту Л = 3/(1 - cos ф), опускания груза правого маятника на высоту 2 = 2/(l-cos\/) и деформации пружины. Полагая, что в.положении равновесия пружина не деформирована, запишем изменение ее потенциальной энергии в виде сХ?/2, где X - деформация пружины, которую в силу предположения о малости колебаний можно определить по формуле X = /ф - /\/ = /(ф - V). Тогда потенциальная энергия системы при ее отклонении от положения равновесия П = Зт/(1 - cos ф) - 2т/(1 - cos\/) + cli - \/) . 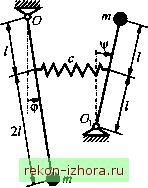 Рис. 19.26 Так как в выражении для потенциальной энергии нужно учитывать величины до второго порядка малости, представив созф и cos\/ в виде со8ф = 1-ф/2 и cos\/= /2,получим = (11ф+2с12ф\/ + С22\/), где Ci 1 = с/ + 3mgl; = Сз, = -с/; = с/ - 2mgl. Из условий С22 > О, 11 42 21 22 >0 соответственно имеем с > 2mg/l; (19.82) с > 6mg/l. (19.83) Сопоставляя (19.82) и (19.83), получаем, что для устойчивости положения равновесия необходимо выполнение условия (19.83). Подставив выражение для потенциальной энергии (19.80) в (19.78), получим составляющую обобщенной силы от потенциальных сил Qin=-tijqj . (19.84) Составляющая обобщенной силы от диссипативных сил равна где Ф - диссипативная функция Рэлея. Учитьшая вьфажение для скорости (19.75), запишем диссипативную функцию Рэлея Ф для системы с п степенями свободы: 1 N =\b>tti:b = (19.86) 2 ji dqi dqj л n n N TfP rr л n n M y=l Л=1 dqi dqj =1 y=l Здесь Bij являются в общем случае функциями обобщенных координат:
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |