

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Здесь следует напомнить, что производная от единичного вектора т по скалярному аргументу s есть вектор, перпендикулярный X и направленный по нормали к касательной траектории движения точки в сторону ее вогнутости. Модуль этой производной равен кривизне кривой в данной точке: где p - радиус кривизны траектории в данной точке. Тогда единичный вектор п, задающий положительное направление нормальной оси, может быть определен так: = 1. dx п= - р = Вектор n лежит в соприкасающейся плоскости и направлен по главной нормали в сторону вогнутости траектории к центру ее кривизны в данной точке. Третья ось естественной системы называется бинормальной осью (бинормалью). Она перпендикулярна к касательной и нормальной осям, а ее положительное направление можно найти по единичному вектору бинормали b , который определяется как результат векторного произведения единичных векторов т и п в виде Ь=ххп , 11=1. Таким образом, векторный базис х, п и b определяет положительные направления соответствующих координатных осей в каждой точке траектории. Оси естественной системы (касательная [т], нормаль [п] и бинормаль Щ), построенные в точке М траектории, образуют естественный трехгранник. Грани его, определяемые каждой парой пересекающихся осей, совпадают с соприкасающейся (т, п), нормальной in, Ъ) и спрямляющей, или касательной, {Ь, х) плоскостями (рис. 1.10). При движении точки Мпо своей траектории естественный трехгранник с вершиной в точке М также движется и ориентация его граней и осей, их образующих, изменяется в пространстве. Нормальная плоскость Соприкасающаяся плоскость 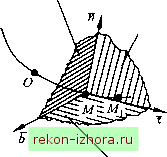 Спрямляющая плоскость Рис. 1.10 Теперь можно перейти к определению скорости при естественном способе задания движения точки. Согласно основному определению скорости (1.1) и (1.51), - dr dr ds dr . dt ds dt ds или, с учетом определения единичного вектора x = dr/ds, v = iT. (1.52) Из (1.52) следует, что проекция скорости точки на ось, касательную к траектории точки, равна Очевидно, что v = = vf. При v=s>0 точка движется в положительном направлении отсчета s, а при v=s<0 - в противоположную сторону. Модуль скорости, т. е. ее численное значение, при естественном способе задания движения точки определяется так: Для ускорения на основании (1.3) имеем dv d(vJt) rfv- dx .. .dx a =-= -i-LJi = -T + v,- = 5X4--, dt dt dt dt dt dx dx ds ds I где - =---=--- . dt ds dt dt p Таким образом, - s a=sx + - n , (1.53) a =vT + -n . P Из (1.53) следует, что ускорение представляет собой сумму s касательной cl=sx и нормальной а =-п составляющих (рис. 1.11): J 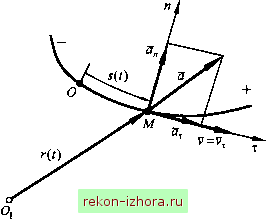 Рис. 1.11 Полученный результат подтверждает вывод о том, что вектор а лежит в соприкасающейся плоскости (х, w) (см. § 1.2). Проекции ускорения на оси естественной системы координат (касательйую, нормаль и бинормаль) равны
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |