

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Тогда Здесь коэффициент динамичности Х при инерционном возбуждении , р Для исследования амплитудно-частотной характеристики, заменив коэффициент расстройки z обратной ему величиной t, = (o/p, получим 2 7(1-2)2 По структуре А, полностью совпадает с X(z) при силовом или кинематическом возбуждении. Следовательно, при z = 0 £,00, = 0; при Z -> 00 = О, A,j, = 1; приг = 1 = 1, ?1, =1/ = Д. При d<y[2 имеет место максимальное значение Х = -=J , которому соответствует i = \-djl или z = , , т. е. в отличие от силового или кинематического возбуждения максимальное значение коэффициента динамичности смещено вправо от резонансной частоты. При d>y[2 максимальное значение А, = 1, z -> оо. Зависимость A, (z) при различных значениях коэффициента d представлена на рис. 19.17. Как и в случае силового или кинематического возбуждения, при определении амплитуды вынужденных колебаний в реальных системах с малым вязким сопротивлением последнее можно не учитывать, если известно, что частота р возмущающей силы далека от собственной частоты со. Фазочастотная характеристика не зависит от способа возбуждения (см. рис. 19.16). 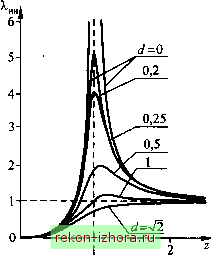 Рис. 19.17 Переходные процессы Важной характеристикой колебательной системы является временная характеристика - изменение колебаний во времени. Анализ решения (19.54) показал, что по истечении определенного промежутка времени с начала колебаний свободное движение затухает. Однако оно возникает каждый раз, когда изменяется возмущающая сила: возникает, меняется ее амплитуда, или частота, и наконец, прекращает действовать. Возникнув, свободное движение осуществляет плавный переходный процесс от одного установившегося режима вынужденных колебаний к другому. Для того чтобы получить переходный процесс, необходимо зафиксировать значения отклонения и скорости в момент изменения возмущающей силы, а затем, считая эти значения начальными условиями, использовать полное решение (19.54), определив в нем произвольные постоянные. Пример 19.6. К телу массой m = 1 кг (см. рис. 19.2, а), подвешенному на пружине АВ, жесткость которой с = 144 Н/м, приложена сила Fit) = Fq sin pt, где Fq = 2Н; p = 8 рад/с. При движении тело преодолевает силу вязкого сопротивления = -hv , где Л = 1Н с/м. В начальный момент тело смещено от положения равновесия на 4 см и отпущено без начальной скорости. Через 200 с после начала движения амплитуда приложенной силы увеличилась в полтора раза, а еще через 200 с действие силы прекратилось. Исследовать движение тела. Решение. Рассмотрим три временных интервала движения: 0...200с, 200...400сиболее400с. На первом интервале (промежуток времени от О до 200 с) дифференщ1аль-ное уравнение движения в каноническом виде (19.5) при Р = О имеет вид х+2ех+оух/osinpt, где е = h/2m = 0,5 рад; со = yjc/m = 12 рад; /о = Fo/m = 2 м/с . Поскольку е < со, запишем решение в виде x = е~ (С со8(0,г + С21 sin (о,г) + Dsin(pr - у), где Сц и С21 - произвольные постоянные на первом интервале движения; co,=Vco-e =11,99рад; В= . =0,025 м; y = aictg , = V(co-p)44eV = 0,1 рад. Подставив в общее решение начальные условия: при / = 0 д: = 0,04м; д: = 0, определим произвольные постоянные С = 0,042 м; С21 =-Ч),015м . Следовательно, x = е-(0,042cosl l,99f -0,015sin 11,990 + 0,025sin(8f -0,1) м . Процесс перехода от начального смещения к установившимся вынужденным колебаниям представлен на рис. 19.18, а. Видно, что продолжительность переходного процесса составляет примерно 9 с. Поскольку она существенно меньше 200 с, можно при определении параметров движения в конце первого интервала учитывать только частное решение, определяющее установившиеся вынужденные колебания: / = 200с; д:(200) = Dsinipt - у) = -0,018 м; jc(200) = Dpcosipt - у) = -0,134 м/с. Эти значения будут начальными условиями на втором интервале движения. На втором интервале (промежуток времени от 200 до 400 с) решение с учетом линейной зависимости D(Fq) будет иметь вид x = е~ (С,2 cos со,Г2 + С22 sin (0t2) + 1,5D sin(/7f 2 - у),
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |