

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 19.4. Вынужденные колебания линейной системы с одной степенью свободы Дифференциальное уравнение вынужденных колебаний линейной системы с одной степенью свободы имеет вид (19.25). В случае, когда обобщенная сила Q(t), характеризующая внешнее воздействие на колебательную систему, изменяется во времени по закону синуса или косинуса: G(0 = Go sin(pr + p), где бо Р - соответственно амплитуда, частота и начальная фаза обобщенной силы, имеет место гармоническое возбуждение колебаний. Способы возбуждения вынужденных колебаний. Определение обобщенной силы Q(t) Способы возбуждения колебаний можно условно разделить на группы. На рис. 19.12 приведены три наиболее характерных способа возбуждения вынужденных колебаний простейшей колебательной системы. Система представляет собой тело массой т, имеющее возможность двигаться по гладкой горизонтальной поверхности. С телом скреплена пружина, жесткость которой с. Обобщенная координата х отсчитывается от положения равновесия системы (при отсутствии внешнего воздействия), когда пружина не напряжена. 1. Силовое возбуждение (см. рис. 19.12, (з). Система находится под воздействием силы F(t) = Fq sin{ pt + P), приложенной извне и не зависящей от параметров системы. В этом случае для получения Q(t) необходимо задать вариацию обобщенной координаты 8х и, вычислив возможную работу только от действия силы F(t), разделить ее на Sx: e(o==Fosin(pr+p). 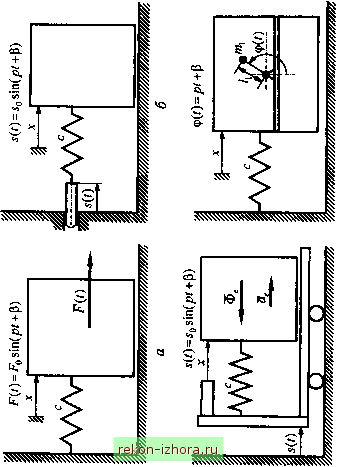 2. Кинематическое возбуждение (см. рис. 19.12, б). Вынужденные колебания возникают в результате задаваемого извне перемещения точки крепления пружины s(t) = Sq s\n(pt + Р), не зависящего от параметров системы. Изменение условной потенциальной энергии пружины при одновременном перемещении ее концов равно Я= 1/2 а =\/2c[x-s(t)]\ Тогда где бп = ; 6(0 = sin(/7/ + Р). 3. Инерционное возбуждение. Возможны два случая. A. Вынужденные относительные колебания (см. рис. 19.12, в). Механическая система находится на подвижном основании, перемещение которого, независящее от параметров системы, задается извне, причем необходимо исследовать относительные (по отношению к подвижному основанию) колебания. Система координат, связанная с подвижным основанием, движется вместе с ним поступательно, прямолинейно, но неравномерно. Поэтому при составлении дифференциального уравнения вынужденных относительных колебаний необходимо учитывать переносную силу инерции = -nia, направление которой противоположно направлению переносного ускорения. Переносное ускорение = s(t) при этом считается сонаправленным с s(t). Обобщенная сила Q(t) будет определяться , т. е. Q(t) = Zia = .rnm = mps, sm(pt -ь p). B, Вынужденные колебания, вызываемые вращающимся эксцентриком (см. рис. 19.12, г). Тело скреплено с эксцентриком, имеющим массу /w, т, эксцентриситет /, и вращающимся с постоянной угловой скоростью. Обозначив через ф = + Р угол отклонения эксцентрика от вертикали, выразим Q{t) через проекцию на горизонталь центробежной силы mpl:
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |