

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика где X - координата груза, отсчитываемая от положения статического равновесия вниз; е = h/2m = 1 рад/с; со=. Поскольку статическая деформация пружины связана с жесткостью с пружины и весом груза Р соотношением (19.3) (где P = mg), то , со = 14 рад/с. Начальные условия в данном случае имеют вид при f = 0; х-Х; i = 0 . Так как е < со, имеют место затухающие колебания. Условная частота затухающих колебаний cOj = Vco -е =13,96 рад/с. Согласно (19.34), х = Ае~8т(щ$ + а), где Л = Хп + , л = 0,0501 м. Главное значение а = arctg- = 1,5 рад. Учитывая, что Xq+exqKO и, следовательно, а лежит в Ш квадранте, добавим к главному значению а величину к. Тогда решение будет иметь вид X = 0,050 к sin(13,96/ + 4,641), где ;с в м. Зависимость x{t) представлена на рис. 19.9, б. Выше было отмечено, что затухающие колебания рассматривают на промежутке времени ЗТд = 3/е = 3с. За это время условная амплитуда колебаний уменьшится примерно в 20 раз. Влияние на свободные колебания сил сухого трения Дифференциальное уравнение движения тела, скрепленного с пружиной и находящегося на горизонтальной шероховатой поверхности (рис. 19.10), имеет вид тхл-сх±Р =0, 17 max - сила сухого трения ТТоТ скольжения, равная максимальной силе трения покоя (зависимость силы трения скольжения от значения скорости скольжения не учитывается), знак + соответствует движению слева направо, - - наоборот. х>0 х<0 Рис. 19.10 Ётах Уравнение (19.39) является нелинейным даже с учетом малости колебаний, однако при определенных начальных условиях: при / = 0 jc = jCo, jc = 0 (19.40) можно легко найти его решение, рассматривая последовательно интервалы движения, где знак скорости постоянен и, следовательно, уравнение (19.39) является линейным и может быть представлено в виде X, +cojC = 0, где JC, =jc±a; a = F/с представляет собой отклонение тела от положения равновесия под действием силы, равной максимально возможной силе трения покоя. При начальных условиях (19.40) на первом интервале тело движется влево, а его уравнение имеет вид х + (ох = (оа. При начальном отклонении тела от положения равновесия на величину XQ<a движение не начнется, поскольку упругая сила пружины окажется недостаточной для преодоления силы трения. Полосу -а<х<а называют зоной застоя (рис, 19.11). 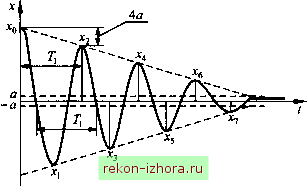 Рис. 19.11 При XQ>a решение с учетом (19.40) будет иметь следую-пдий вид: x = a + (xQ -a)cos(ot. т. е. на первом интервале решение - косинусоида с амплитудой Xq - а, смещенная вверх на величину а (см. рис. 19.11). Полученное решение справедливо, пока л: < О. Так как x = -(o{Xq - а) sin со/, то скорость остается отрицательной до /* = я/со. В этот момент времени тело остановится и его смещение от положения равновесия будет равно jc, = а + (jcq - a)cos л; = -(xq - 2d), т. е. по абсолютной величине уменьшится на 2а по сравнению с начальным. Если jC I > а, то движение начнется в обратную сторону и его уравнение примет вид 3c + cojc = -coa. Отсчитывая время от начала движения в обратную сторону, получаем начальные условия для второго интервала движения: при t = 0 Jc = X, л: = 0. Решение на этом интервале имеет вид jc = (jC +a)cosco/-a и представляет собой косинусоиду с амплитудой \х +а\ = х - За, смещенную вниз на величину а (см. рис. 19.11). Через /* =л;/со тело остановится в крайнем правом положении, имея смещение от положения равновесия, равное Х2 = -х - 2а = jcq - 4а (см. рис. 19.11) ит. д. Движение тела будет продолжаться до тех пор, пока при очередной остановке его в крайнем положении смещение от положения равновесия не окажется по абсолютной величине меньше а. Хотя рассмотренное движение и не является периодическим, можно, как и в случае затухающих колебаний при наличии линейно-вязкого сопротивления, ввести условный период колебаний Г =2п/(о (см. рис. 19.11), характеризующий чередование нулей и максимумов. Период Г, совпадает с периодом колебаний консервативной системы и не зависит от наличия сухого трения. За каждый период 7] амплитуда колебаний уменьшается на величину 4а, т. е. убывает во времени по линейному закону.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |