

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика в ипнженерной практике используют величину, обратную периоду колебаний, называемую частотой колебаний Т 2п и измеряемую в герцах (Гц). Отметим, что круговая частота со, период колебаний Т и частота v не зависят от начальных условий, поэтому их называют собственными характеристиками колебательной системы (например, собственная частота колебаний). Свойство независимости частоты и периода колебаний от начальных условий - свойство изохронности колебаний - связано с линейностью дифференциального уравнения и, следовательно, с допущением о малости колебаний. Пример 19.4. В кривошипно-ползунном механизме, расположенном в вертикальной плоскости, кривошип OA, представляющий собой однородный стержень длиной / = 0,49 м и массой = 3 кг, через шагун АВ, также однородный стержень массой / 2 = 6 кг, связан с ползуном В массой /Из = 3 кг (рис. 19.6). С ползуном скреплена пружина, жесткость которой с,. При вертикальном положении кривошипа OA пружина не деформирована. Трение в шарнирах и опорах ползуна, а также вязкое сопротивление среды не учитывать. Найти, при какой жесткости с, пружины вертикальное положение кривошипа будет устойчивым. Для значения = 5с, получить уравнение движения кривошипа, если в начальный момент времени его повернули на угол, равный 3® против направления вращения часовой стрелки, и отпустили без начальной скорости. Решение. Выберем в качестве обобщенной координаты угол отклонения ф кривошипа, считая его малым. Кинетическая энергия кривошипа Шатун АВ в положении, соответствующем ф = 0, совершает мгновенно-поступательное движение, т.е. его угловая скорость равна нулю. При отклонении кривошипа от вертикали можно записать (см. рис. 19.6) ADOAcos(p = ABsina или, дифференщфуя по времени, -ОАв1п(р<р = АВ cosa а . Отсюда . OAsm(p-(p АВ cosa 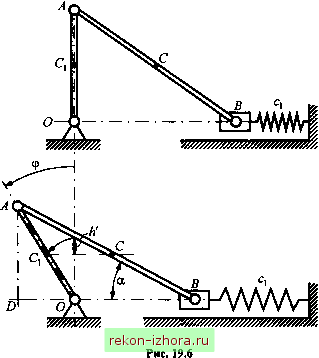 Так как фиф малы, угловая скорость d будет иметь второй порядок малости и, следовательно, при вычислении кинетической энергии шатуна его движение можно считать поступательным, т. е. Тогда суммарная кинетическая энергия Сопоставив это уравнение со стандартным выражением (19.13) для кинетической энергии в системе с одной степенью свободы, получаем обобщенный инерционный коэффициент а = (/и,/3 + т2 + /Из)/. При вычислении потенциальной энергии учтем деформацию пружины и опускание центров тяжести кривошипа и шатуна. С учетом малости ф деформация пружины А. = /ф . Поскольку центры тяжести кривошипа С, и шатуна С при движении механизма находятся на одной горизонтали (см. рис. 19.6), их опускание /г = 1./(1-С08ф). Тогда П = [ci/V - (m, + m2)/(l - со8ф)]. Учитьгоая в разложении созф величины до второго порядка малости: С08ф = 1-ф/2, получаем cf~{m+m2)gl Ф откуда, согласно (19.16), квазиупругий коэффициент c = Ci/-.i(wi+m2)g/. Отметим интересное обстоятельство. Если при определении кинетической энергии движение шатуна можно считать поступательным, то при вычислении потенциальной энергии необходимо учитывать его поворот, поскольку изменение потенциальной энергии шатуна, так же как и изменение потенциальных энергий кривошипа и пружины, имеет второй порядок малости. Для устойчивости положения равновесия необходимо выполнение условия (19.17). Приравнивая с к нулю, находим критическое значение с жесткости пружины: С1кр=( 1+ 2)у = 90Н/м. По условию Cj =5 5ci = 450 Н/м . Таким образом, дифференциальное уравнение движения системы получилось в виде Ф+соФт: О, где © ; © = 6 рад/с. (l/3w, +/ 2+3)/ В соответствии с (19.28) получаем общее решение в виде Ф = С, совш + С2 sin ш. В начальный момент кривошип отклонили от вертикали на угол ф = 3** и отпустили без начальной скорости, т. е. начальные условия (19.29) будуг такими: при / = 0, ф = фо=---3 = 0,052рад, ф = Фо =0. 180 Определив С, = 0,052 рад; = О, находим Ф = 0,052со8бград.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |