

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 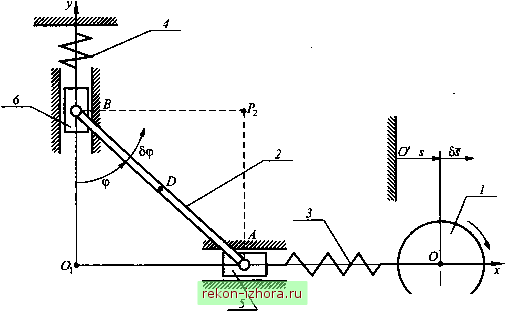 Рис. 18.17 Таким образом, кинетическая энергия системы, выраженная через обобщенные координаты и обобщенные скорости, равна \ f 3 1 Т =--+ -mj/V + cos ф + ml sin ф 2 \ 2 3 Вычислим производные от кинетической энергии системы: дТ 3 . d - = -m.s; - - = -m,s, - - =-m,s, - ds 1 dt\ds) 2 * ds 3 .. &Г = -m,s; = 0; дТ 1 -7- = -т2/ф + /(/И5 созф + т 8Шф)-ф ; 5ф 3 = Jntolip + /(/ 5 cos ф + sin ф)Ф+sin 2ф(тб - )ф; = /з{п2ф(тб-т5)ф оф Для нахождения обобщенных сил б, и разделим приложенные к системе силы на потенциальные и непотенциальные (потенциальными для данной системы являются силы тяжести и упругости пружин, а непотенциальными - силы пары с моментом , а затем каждую обобщенную силу определим как сумму: гдее;=-;ег = Потенциальная энергия системы Я = (5 - /sin ф) + ~4(1 ~ со8ф) -iSi - созф)/ - mg(\ - созф)/ Тогда Qs =-Cз(5-/sinф); бф =~C4/(I-cosф)sinф+Cз/(5-/siпф)cosф + g/ -т-т ${пф; 55 г Таким образом. g, =-Cз(5-/sinф)+Ml/r; йф = 4 ( COS ф) sin ф + Сз/(5 - / sin ф)С03ф + gl sinф. Подставляя значения производных от кинетической энергии и выражения для обобщенных сил О, и О в > равнения (18.40). получаем дифференциальные > равнения движения системы т,5: + Сз5-Сз/51пф = Л/,/г : m J ф + / (/725 cos ф + h ф)ф - 3/(5 - / sin ф) cosф + -C4/ (l-cosф)sinф-g/ sinф = 0. 18.6 Интегральные вариационные принципы механики Интегральные вариационные принципы механики характеризуют свойство движений механических систем на конечных промежутках времени. Системе дифференциальных уравнений, определяющих движение механической системы с п степенями свободы, на временном отрезке [t.t] соответствует определенный интеграл (действие) вида S[q{t)]= \ф{д, q,t)dt. где 0{q,q,t) - заданная функция п обобщенных координат q,{t), п обобщенных скоростей q{t) и времени с помощью которой описывается движение механической системы. Для определения S[q{t)\ строят однопараметрическое семейство траекторий, содержащих заданную траекторию (прямой путь) и траектории сравнения (окольные пути), и делают вывод о вариационных свойствах движения по заданной траектории, где действие имеет минимальное значение. Вариационные принципы отличаются по виду действия, экстремум которого реализуется, и по выбору класса допустимых траекторий, на которых рассматривается экстремум действия. Вариационный принцип объединяет положения механики и, будучи принятым за аксиому, позволяет вывести все законы механики; при этом вариационная форма закона не зависит от конкретного выбора обобщенных координат.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |