

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 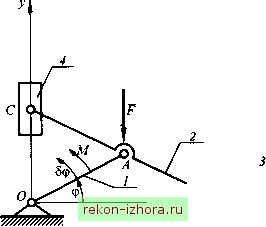 шт 11 шт-Т Рис. 18.12 Подставляя выражения для возможных работ сил в (18.9), получаем А/5ф + 2F,/sin ф 5ф - F/созф 5ф = О. Отсюда F = 2Fitgip+ /созф Однако принцип возможных перемещений позволяет находить и реакции идеальных связей. Для этого, в cootbctqtbhh с принципом освобождаемости, связь отбрасывают, заменяя ее соответствующей реакцией. Эту реакцию включают в число активных сил. При отбрасывании связи увеличивается число степеней свободы системы. Поэтому точке приложения реакции отброшенной связи можно задать возможное перемещение. К системам с неидеальными связями принцип возможных перемещений неприменим. Однако в некоторых случаях, например при движении точки по шероховатой поверхности, связь рассматривают как идеальную, дополняя ее силой трения скольжения. Пример 18.8. Г-образная рама состоит из двух стержней АС w СВ, соединенных в точке С при помощи цилиндрического шарнира (рис. 18.13). Найти момент заделки, если АС = 1, CD = 12, DEl, момент М пары сил и сила F -заданы. Решение. Заменим заделку шарнирно-неподвижной опорой, приложив при этом к стержню АС пару сил с моментом Мд . Дадим системе возможное перемещение, повернув стержень АС на угол 5ф вокруг оси, проходящей через точ-к> А. При этом стержень С В повернется вокруг мгновенной оси, проходящей через точку D на угол 6а = l\/l24> 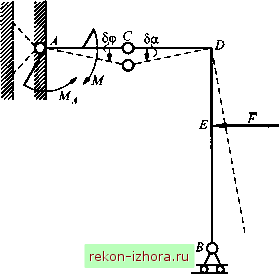 Рис. 18.13 Сумма возможных работ приложенных к раме сил, включая момент заделки, равна n дА(Р)ЬА(Мд) + ЬА(М) + ЬА(Р), /,/з где ЬА(Мд) = -МдЬ(р; 5(Л) = Шф; 5/i(F) = -f55/.; 85 = Z)£5a =-5ф. Приравняв сумму возможных работ к нулю, получим - Л/5ф+ Шф- 5ф = О, откуда МдМ-F Условия равновесия механической системы в обобщенных силах Положим, что механическая система, состоящая из N точек, в силу наложенных на нее голономных удерживающих связей имеет п степеней свободы. Положение такой системы в пространстве определяется обобщенными координатами иг-л? и радиус-вектор к -й точки есть функция обобщенных координат: Возможное перемещение каждой точки системы ,=1 dq, Подставляя выражение для бг в условие (18.7) равновесия системы, получаем: JL- fjLriF. Л = 0. После изменения порядка суммирования это условие принимает вид titk -fV =tQ>i =0 (18-10) Так как обобщенные координаты независимы, то их вариации 89i,892-8w тоже независимы между собой. Поэтому условие (18.10) будет выполнено, если равны нулю обобщенные силы, соответствующиевсем обобщенным координатам системы: а=0, / = 1,2,..., . Таким образом, условия равновесия механической системы можно сформулировать так: для равновесия системы, подчиненной голономным удерживающим связям, необходимо и достаточно, чтобы обобщенные силы, соответствующие всем обоб-щенньш координатам системы, были равны нулю. Если силы, приложенные к точкам механической системы, потенциальные, то Q = dq, dq,
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |