

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 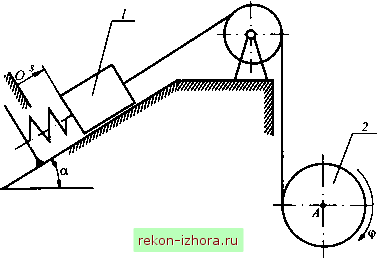 Рис. 18.11 18.4. Дифференциальные принципы аналитической механики Принципы механики являются основой эффективных методов изучения равновесия и движения механических систем. Их принято разделять на вариационные и невариационные. Невариационные принципы устанавливают общие для всех движений систем свойства, которые имеют место как в определенные моменты, так и на конечных интервалах времени. К ним относятся аксиомы механики, принцип независимости действия сил, принцип Даламбера и т. п. Вариационные принципы устанавливают критерии, позволяющие отличить истинное состояние системы от возможного. Вариационные принципы разделяют на дифференциальные и интегральные. Дифференциальные принципы устанавливают критерии истинного состояния системы для фиксированного момента времени, а интегральные - на конечном интервале времени. Принцип возможных перемещений Аналитические условия равновесия механических систем были сформулированы Ж. Лагранжем в его фундаментальной работе Аналитическая механика (1788 г.) как принцип воз- можных скоростей . В настоящее время принцип, определяющий в общей форме условия равновесия системы, называется принципом возможных перемещений или принципом Лагранжа: чтобы данное положение механической системы со стационарными идеальными связями было положением равновесия, необходимо и достаточно, чтобы сумма элементарных работ активных сил на любом возможном перемещении системы из этого положения была равна нулю. Данной формулировке соответствует условие равновесия системы 1.-8г,=0 (18.7) или в декартовых координатах Положением равновесия называется такое положение механической системы, в котором она может находиться сколь угодно долго, если в начальный момент времени система была приведена в это положение с нулевыми скоростями (v = 0). Необходимость условия (18.7) для равновесия системы можно доказать следующим образом. Пусть механическая система, состоящая из N материальных точек, находится в равновесии. Тогда приложенные к каждой точке активные силы и реакции связей уравновешены, т. е. /;+Л=0, A: = 1,2,...,7V. (18.8) Умножив каждое равенство (18.8) на возможное перемещение соответствующей Л-й точки и просуммировав скалярные произведения, получим Если наложенные на систему связи идеальные, то = О и условие ] =0 является необходимым условием равно- весия системы. 514 Доказательство достаточности принципа Лагранжа проведем методом от противного. Предположим, что условие (18.7) выполнено, а система не находится в равновесии. Значит под действием активных сил и реакций связей система за малый промежуток времени совершит некоторое действительное перемещение. При стационарных связях это действительное перемещение совпадает с одним из возможных, поэтому N N Так как связи идеальные, то = О и тогда 0, что противоречит принятому выше предположению. Таким образом достаточность принципа возможных перемещений доказана. Принцип возможных перемещений дает возможность определить положение равновесия несвободной системы, не рассматривая реакции идеальных связей, так как они не входят в формулировку этого принципа. Пример 18.7. Найти вертикальную силу F, приложенную в точке А к линейке 2 эллипсографа (рис. 18.12), которая обеспечит равновесие системы при заданном угле ф (О < ф < я/2). Сила и момент М пары сил известны. Трением в шарнирах и направляющих, а также массой элементов системы пренебречь. Решение. Условие равновесия эллипсографа имеет вид n ЩР ) = ЬА{М) + ЩГ) + ЩР) = О. (18.9) Дадим системе возможное перемещение, повернув кривошип 7 на угол 5ф. Возможная работа пары сил с моментом М равна Ш(р. Вычислим возможную работу сил F, и F : Так как 8А(Р,)==Р 8х, 8A(F) = Fy8y,. F,.=-F ;сд=2/со8ф, &хд =-2/8Шф5ф; Fy = Уд = /sinф, Ьуд = /созфбф, bA(F) = 2F,/sinф 5ф; ЬА(Р) = -F/cosф 5ф.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |