

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Для задания движения точки в криволинейных координатах необходимо иметь уравнения движения точки в виде 9,=9Д0;/=й. (1.31) Характеристиками криволинейной системы координат являются координатные линии и координатные оси. Координатные линии (q), проходящие через любую выделенную точку М пространства с фиксированными значениями координат д, Ягм соответствующие каждой /-й криволинейной координате, можно определить как годограф радиус-вектора точки л/, изменяющегося в результате варьирования одной вьщеленной i-й криволинейной координаты при условии, что другие сохраняются постоянными и равными их значениям в вьщеленной точке: =(9ш.92.9зм); (1.32) 1Сасательная к /-й координатной линии в данной точке называется координатной осью Мд, относящейся к /-й криволинейной координате в данной точке (рис. 1.6). Положительные направления координатных осей задаются единичными векторами, которые называются базисными. Они определяются через частные производные от радиус-вектора точки по /-Й обобщенной координате в данной точке М: ,/ = 1,3. 1.33) Здесь Hi - - параметр, который называется i-M коэф- фициентом Ламе и равен значению модуля частной производной от радиус-вектора точки по /-й криволинейной координате, вычисленной в данной точке М. Каждый из векторов имеет направление, соответствующее направлению движения точки конца радиус-вектора при возрастании /-й обобщенной координаты (см. (1.32)). Таким образом, в общем случае при любом текущем положении точки М в пространстве можно построить семейство координатных линий (q), осей Л/, и базисных векторов е со-отвествующих каждой из трех криволинейных координат q, (см. рис. 1.6). 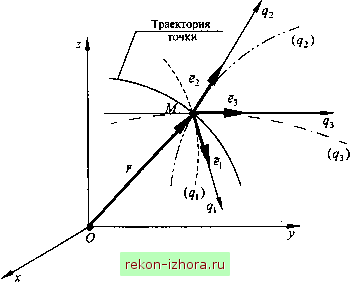 Рис. 1.6 Если базисные векторы во всех точках пространства взаимно перпендикулярны, то такая система криволинейных координат называется ортогональной. При этом = О, если у , / = 1,3, у = 1,3. В дальнейшем будем рассматривать только такие системы. С учетом (1.30) коэффициенты Ламе могут быть выражены через частные производные от декартовых по криволинейным координатам в виде 19 J (1.34) Скорость точки М при задании ее движения в криволинейных координатах определится в виде векторной суммы составляющих скоростей, параллельных координатным осям: dt dq dq, dq Проекции скорости на соответствующие координатные оси равны =e=H,q, / = 1,3. (1.36) Модуль скорости в ортогональной криволинейной системе координат можно рассчитать по зависимости -Н < =4 UUHlqUHlql . (1.37) В формулах (1.34)-(1.37) значения производных и коэффициентов Ламе вычисляют для текущего положения точки М в пространстве. Проекции ускорения точки М на оси криволинейной системы координат определяют в соответствии с (1.3), (1.33) и (1.35) по формуле dv dt dq, , / = 1,3. (1.38) Преобразуем выражение (1.38) к удобной для расчетов форме. Для этого выражение в скобках представим в виде dv дг dt dqi dt дг .d - V - dt (1.39) В последнем слагаемом в (1.39), изменяя порядок дифференцирования, проведем тождественное преобразование £ dt dt) dq, (1.40) Дифференцируя левую и правую части выражения (1.35), получаем dv дг dq, dq. (1.41)
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |