

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 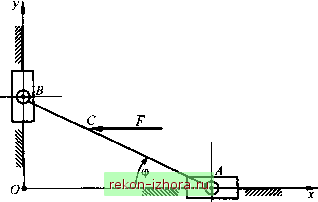 Рис. 18.5 Аналогично радиус-вектор точки В = /sin ф у и bPff = /созфбф j . Если на систему, состоящую из материальных точек, наложено т голономных и s неголономных связей, то число обобщенных координат п-ЪМ-т. Обобщенные координаты и их производные по времени должны удовлетворять s уравнениям неголономных связей. Если неголономные связи линейны относительно обобщенных скоростей q то для вариаций обобщенных координат могут быть получены s уравнений вида (,\{ЧпФЧ\ +/2(9,. 082 +- + /Л9/.089;, = 0, 7 = 1,2,..., 5. Число независимых вариаций обобщенных координат, а значит, и число степеней свободы неголономных систем -ЪМ-m-s. Таким образом, число обобщенных координат больше числа степеней свободы, и обобщенные координаты неголономных систем не являются независгшыми, 18.2. Возможная работа силы. Идеальные связи Возможной работой силы называется работа силы на любом возможном перемещении точки ее приложения: 5A(F) = F5r. Для вычисления возможной работы можно применять известные формулы для элементарной работы силы, подставляя вместо элементарного действительного d г возможное Ъг перемещение точки. При использовании декартовых координат ЪА(Р) = F,5x + Fy5y + F,bz. Например, возможная работа горизонтальной силы F , приложенной к стержню в точке С (см. рис. 18.5), равна 5A{F) = = FbXf . Так как F=-F, jc = ВСсозф и Ьх = -ВСsin ф 5ф, то 5ДF) = F5Csinф 5ф . Если к твердому телу, вращающемуся вокруг неподвижной оси Oz приложена сила F , момент которой относительно оси равен А/., то 8ДЛ = М,5ф, где 5ф - возможный угол поворота тела вокруг оси Oz. Установив понятие возможной работы силы, можно расширить классификацию связей, разделяя их на идеальные и неидеальные. Связи называются идеальными, если равна нулю сумма элементарных работ реакций этих связей на любом возможном перемещении системы (из занимаемого в данный момент времени положения). Для идеальных связей f,(Rb5x,+R,8y,-R 8z,)=0. Полагая связи идеальными, можно решить задачу динамики несвободной системы. Эта задача состоит в том, что для данной системы с заданными активными силами и начальными условиями нужно найти уравнения движения и реакции связей. Например, если материальная точка движется по гладкой поверхности, уравнение которой f(x,y,z) = 0, то нормальная реакция = X,grad/, где X - неопределенный множитель Лагранжа. Уравнение связи совместно с дифференциальными уравнениями движения точки образует замкнутую систему уравнений. Эта система уравнений позволяет определить как уравнения движения точки, так и множитель Лагранжа, а значит, и нормальную реакцию связи Приведем примеры идеальных связей. 1. Гладкая поверхность (плоскость) для материальной точки (рис. 18.6). В этом случае 5A(R) = Rbr=\R\ \Щ со8(л, 5f) = о, так как вектор R расположен вдоль нормали к поверхности и, следовательно, ортогонален вектору Ьг возможного перемещения точки. 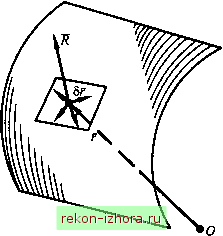 Рис. 18.6 2. Нерастяжимая нить. Реакция нити - сила ее натяжения - ортогональна возможному перемещению точки ее приложения. Поэтому Rbr=0,
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |