

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика быть выбраны: 1) координаты центра масс катка 7 и центра масс цилиндра 5; 2) координата л: центра масс катка и угол фз поворота цилиндра 5; 3) координаты х и центра масс цилиндра 3 относительно фиксированной точки D нити. Конкретный выбор обобщенных координат определяется поставленной задачей. 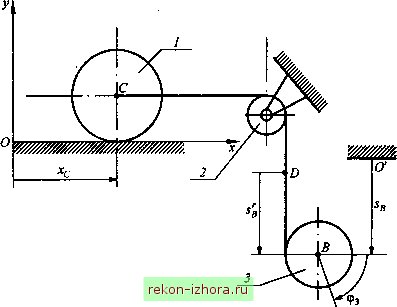 Рис. 18.3 Для системы, состоящей из N точек, на которые наложено т голономных удерживающих связей, через обобщенные могут быть выражены n = 3N-m независимых декартовых координат. Остальные декартовы координаты выражаются через те же обобщенные координаты с помощью т уравнений связей. Следовательно, и радиус-векторы всех точек системы выражаются через обобщенные координаты: гк (91.92.-. 9,1.0. Например, положение кривошипно-ползунного механизма, показанного на рис. 18.4, определяется двумя его точками А и В. Из четырех декартовых координат (х, у, х, у) независимой будет только одна, так как число т голономных удерживающих связей равно трем: ОА = 1 = const, AB = l2 = const, j = О. 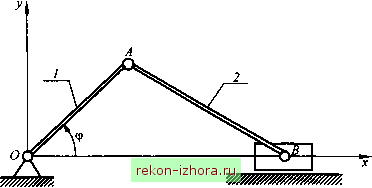 Рис. 18.4 Если за независимую декартову координату принять jc, а за обобщенную - угол ф поворота кривошипа 7, то jc =/ созф. Другие декартовы координаты точек системы определим при помощи уравнений связей. Из уравнения х\л-у\-1 = О находим Уд =/, sin9. Ордината у =0. Из условия {х -л:) у\ -l\ -- О получаем х\ - 2/,jc созф +1\ -1] . Если /2 = /], то х = = 2/1 С08ф. Таким образом, все декартовы координаты точек системы выражены через угол ф. Возможные перемещения. Число степеней свободы механической системы Перемещение материальной точки зависит от ее массы, приложенных к точке сил, связей и начальных условий. Определение действительного перемещения сводится к решению задачи динамики точки. В аналитической механике в качестве одного из основных используется понятие о возможном перемещении точки. Возможным называется любое допускаемое связями перемещение материальной точки из положения, занимаемого ею в данный момент времени, в бесконечно близкое положение, которое она может зангшать в тот же момент времени. Возможные перемещения не связаны ни с движением точки, ни с изменением наложенных на нее связей. Они представляют собой воображаемые перемещения, которые можно представить совокупностью бесконечно малых векторов Ъг , зависящих только от структуры связей, зафиксированных в рассматриваемый момент времени. Вектор Ъг называют вариацией радиус-вектора точки, а проекции Ъг на оси декартовой системы координат- вариациями координат. Их обозначают 6jc, 8у, 8z. Возможные перемещения точки должны удовлетворять дифференциальным соотношениям, вытекающим из уравнений связей при условии, что время является фиксированным. Получим эти соотношения и установим различие между бесконечно малым действительным dr и возможными Ъг перемещениями точки. Пусть на материальную точку наложена голономная удерживающая связь, уравнение которой f{x,y,zj) = 0. (18.3) Этому уравнению удовлетворяют координаты точки в момент времени Через бесконечно малый промежуток времени dt координаты (jc + dx\ {у + dy\ (z + dz) точки также должны удовлетворять уравнению связи, т. е. /(jc + dx,y + dy,z + dz,t + dt) = 0. (18.4) Раскладывая функцию (18.4) в ряд Тейлора с точностью до слагаемых выше первого порядка малости и учитывая, что связь имеет вид (18.3), получаем dxdydzdt = 0. (18.5) дх ду OZ dt
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |