

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика При использовании стендов второй группы (рис. 17.7, б) дебаланс устраняют поочередно в каждой из плоскостей коррекции. Для этого ось О, качания рамы совмещают с одной из плоскостей коррекции, а упругую опору, допускающую движение оси ротора только в одной плоскости, - с другой. Действие сил инерции проявляется в виде деформации упругой опоры. При известном коэффициенте жесткости опоры эта деформация пропорциональна квадрату.угловой скорости ротора и дебалансу. Установка в плоскости коррекции П2 балансировочного груза с таким же дебалансом позволяет уравновесить силы инерции ротора и груза в этой плоскости. После перестановки ротора (или перестановки опор) проводят балансировку в другой плоскости коррекции (П,). Глава 18 ОСНОВЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ 18.1. Основные понятия Аналитическая механика - это раздел теоретической механики, в котором изучение равновесия и движения механических систем основано на дифференциальных и интегральных принципах механики. В отличие от векторной механики Ньютона в аналитической механике используются энергетические характеристики движения. Подчинение этих характеристик принципам механики позволяет получить наиболее общие формы как условий равновесия, так и дифференциальных уравнений движения механических систем. Связи и их классификация Механическая система, точки которой могут занимать любое положение в пространстве и иметь любые скорости, называется свободной. Например, свободной системой является космический аппарат, движущийся по орбите вокруг Земли. Его движение не ограничено другими телами и поэтому, прикладывая к аппарату соответствующие силы, можно изменять траекторию его центра масс и поворачивать аппарат вокруг центра масс. Если на координаты и скорости точек системы наложены ограничения, то система называется несвободной, а ограничения называются связями. Механические связи реализуются в виде различных устройств или тел (стержни, нити, шарниры и т. п.). Аналитически связь описывается уравнением вида Ограничивая движение механической системы, связи действуют на ее точки посредством сил, которые называются реакциями связей. При изучении равновесия и движения механических систем методами аналитической механики применяется принцип освобождения (аксиома о связях). Этот принцип состоит в том, что любую систему можно рассматривать как свободную, приложив к ее точкам реакции, соответствующие отброшенным связям. Связи называются голономными, если они описываются уравнениями вида /Дх : г О = 0, Л = 1,2,...,Л, 7 = 1,...,т. (18.1) Такие связи накладывают ограничения на координаты точек, а значит, на положение системы в пространстве. Это так называемые геометрические связи. Вместе с тем голономные связи накладывают ограничения и на скорости точек системы. Соответствующие условия получаются в результате дифференцирования уравнений (18.1) по времени: x, + У к + Голономные связи могут описываться и дифференциальными уравнениями, однако последние обязательно должны быть интегрируемыми. Пример I8.L Получить уравнения связей для диска радиусом г, который катится без скольжения по плоскости (рис. 18.1). 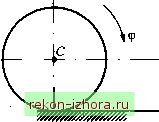
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |