

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика дит через центр масс, центробежные моменты инерции Jxz= Jyy = о и уравнения для определения динамических реакций подпятника А и подшипника В принимают вид X\XlMZyY,+M(Si\X,=\ (17.34) г; + - MZjX, + MfsP-Jc = О; (17.35) YOA-YiOB = 0; (17.36) -ХОА + ХОВ = 0. (17.37) Отсюда находим =М~{г1 +(о1ХХ1- +Y,); (17.38) В этом случае главный момент сил инерции тела относительно точки О равен нулю, и система сил инерции приводится к равнодействующей, приложенной в точке О и равной по модулю М{г} + со ){Х1 +Ус). Поэтому динамическими реакциями опор будут параллельные силы и , которые направлены противоположно равнодействующей сил инерции тела, а их модули (17.38), (17.39) обратно пропорциональны расстояниям от центра приведения О до соответствующей опоры. Пример 17.3. Однородный диск массой М равномерно вращается вокруг оси OZ с угловой скоростью О) (рис. 17.5). Расстояние от оси 0Z до центра масс диска (точки О равно h. Найти динамические реакции опор. Решение. Поместим начало связанной с диском системы координат в точку О пересечения оси OZ с горизонтальной плоскостью симметрии диска. Ось OY направим так, чтобы она проходила через центр масс диска. В этом случае ось OZ будет главной одью инерции диска в точке О, и, следовательно, J = О, Jyz =0 и Л =0. Это значит, что система сил инерции диска приводится к равнодействующей, которая приложена в точке О и расположена вдоль оси OY. При принятых условиях из уравнений (17.34) и (17.37) находим ЛГ = ЛГ = О, а из уравнений (17.35) и (17.36) получаем АВ АВ 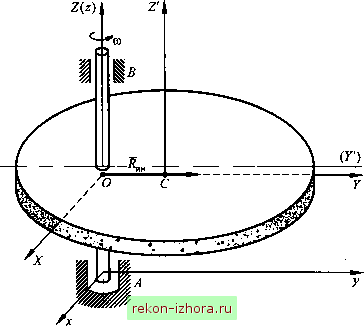 Рис. 17.5 На основании вышеизложенного, можно сделать следующие выводы: 1. Динамические реакции могут существовать даже тогда, когда ось вращения тела проходит через его центр масс. Динамические реакции опор образуют пару сил, модули которых зависят от центробежных моментов инерции тела, угловой скорости и углового ускорения. 2. Если ось вращения тела является его главной и центральной осью инерции, то динамические реакции подшипника и подпятника равны нулю, а статические реакции зависят только от внешних сил. 17.6. Балансировка роторов Детали машин, как правило, изготавливают с некоторыми погрешностями, да и их материал может быть неоднородным по плотности. Поэтому трудно предположить, что ось вращения такой детали, например ротора, будет ее главной центральной осью инерции. Следовательно, при вращении ротора будут возникать нежелательные динамические реакции опор. Эти реакции тем больше, чем больше масса, размеры, моменты инерции и угловая скорость ротора. Для уменьшения динамических реакций в инженерной практике применяют балансировку роторов после их изготовления. Задача балансировки заключается в том, чтобы по возможности сделать ось вращения ротора его главной центральной осью инерции. Наиболее актуальна балансировка для быст-ровращающихся роторов (например, турбины), поскольку динамические реакции пропорциональны квадрату угловой скорости ротора. Различают статическую и динамическую балансировки роторов. Задачей статической балансировки является совмещение центра масс ротора с осью его вращения. Такую балансировку называют статической потому, что ее можно провести не приводя ротор во вращение. На рис. 17.6 показан диск, центр масс которого (точка С) смещен от оси вращения на расстояние d. Вследствие этого дебаланс диска равен Md, где М- масса диска с валом. Если установить диск в призмах с малым трением так, чтобы его ось была горизонтальной, и предоставить самому себе, то после некоторого вращения диск займет положение, при котором точка С окажется на вертикальном диаметре ниже оси вращения. 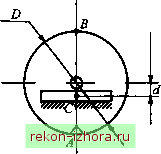 
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |