

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика ские реакции подшипника и подпятника образуют пару. Модули сил этой пары в соответствии с (17.27) и (17.28) определяются выражением Полученный результат не зависит от выбора центра приведения системы сил. Действительно, если в качестве центра приведения выбрать произвольную точку О на оси вращения тела (см. рис. 17.2), то уравнение (17.26) будет иметь следующий вид: Так как ось вращения тела - центральная, то Х = -Х и тогда что аналогично выражению для Х в случае, когда за центр приведения системы сил была принята точка А. Такой же результат получается для. и У. Не меняются при изменении центра приведения и центробежные моменты инерции тела, т. е. Jxz = Лг и Jyz = yz Например: N N N N =Y,k(Z,-OA)=m,X,Z,-OAYm.X, . к = \ к=\ к=\ к=\ Так как = МХ = О, то = Y,kkk = = XZ Таким образом в случае статической уравновешенности тела динамические реакции опор приводятся к паре сил и могут быть не равны нулю. Пара сил инерции может быть уравновешена только парой - динамическими реакциями опор. Модули реакции зависят от угловой скорости (Оу и углового ускорения 8 твердого тела, распределения массы по его объему (что характеризуется центробежными моментами инерции Jz и Jyz % а также от расстояния между опорами. Пример 17.2. Однородный стержень CD (рис. 17.4) массой т и длиной 21 вращается с. постоянной угловой скоростью со вокруг вертикальной оси Or. Определить динамические реакции подпятника А и подшипника В, если расстояние между ними h. причем ОА = ОВ. 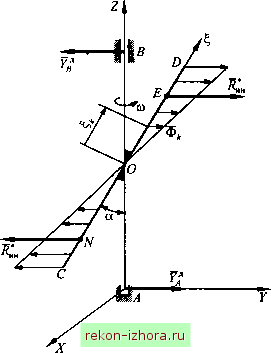 Рис. 17.4 Решение. При равномерном вращении сила инерции элемента стержня, масса которого , по модулю равна = т(о sina - . Следовательно, интенсивность сил инерции изменяется вдоль стержня по линейному закону. Распределенные силы инерции на каждом из участков стержня ОС и 0D можно заменить равнодействующими равными по модулю i/w/wsina и при- ложенными в точках Е и отстоящих* от точки От j/. Равнодействующие сил инерции для участков стержня образуют пару, модуль момента которой равен -/и/0) sin 2а . Эта пара сил уравновешивается парой, образованной ди-6 намическими реакциями подшипника и подпятника. Так как расстояние между опорами h, то = -/и/Ю sin 2а . 6Л Такой же результат может быть получен при использовании уравнений (17.23)-(17.26). По условию данной задачи 8 = 0. Ось .АХ является главной осью инерции стержня CD в точке А, так как она перпендикулярна плоскости симметрии стержня. Поэтому из (17.23) и (17.26) следует, что = Х = О. Из уравнения (17.25) получаем = Центробежный момент инерции стержня Л ;v j Jyz =mY\Z =]/wsina(0/J + cosa)=-m/-sin2a. Следовательно. Y--mlW sin 2a, 6h Динамическая уравновешенность Твердое тело, вращающееся вокруг неподвижной оси, называют динамически уравновешенным, если равны нулю динамические реакции подшипника и подпятника. Из уравнения (17.27) следует, что динамическая реакция подшипника будет равна нулю, если J =Jy=0,t, е. если ось AZ вращения тела будет его главной осью инерции в точке А. Чтобы при этом была равна нулю и динамическая реакция подпятника, необходимо, как это следует из (17.28), чтобы равнялись нулю не только центробежные моменты инерции и Jy, но и координаты и центра масс тела. Второе условие может быть выполнено, если ось AZ будет проходить через центр масс тела, т. е. будет центральной осью. Таким образом, вращающееся вокруг неподвижной оси твердое тело будет динамически уравновешено, если ось вращения является его главной центральной осью инерции. В случае, когда ось OZ вращения тела является его главной осью инерции в какой-либо точке О (см. рис. 17.2), но не прохо-
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |