

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Х+Х+Ш;,¥с+М(а1Х,=0; (17.23) у; + Г/ - Afe г + М(о1 Y,=0; (17.24) -YAB + JxzSz-Jyz(1=, (17.25) XAB + Jye;,+Jxz(i>l=0. (17.26) Определив из уравнений (17.26) и (17.25) получаем J?=M+ >z)(i.+?.)- (17.27) Аналогично находим = {(4 + CD,) X [(7 + У,) + (ЛГ,. -ь У, - (17 28) -2М(7;ЛГ,.+Л,Г,.)5]}/. Как видно, динамические реакции подшипника и подпятника зависят от угловой скорости и углового ускорения тела, а также от распределения массы тела относительно оси его вращения. Реакция опоры твердого тела, вращающегося вокруг неподвижной точки Применим метод кинетостатики для определения реакции опоры твердого тела, вращающегося вокруг неподвижной точки О (рис. 17.3). Если трением в опоре пренебречь, то реакция опоры - сила, приложенная к твердому телу в точке О. Сила не создает момент относительно точки О и осей координат, проходящих через эту точку. Поэтому для определения реакции опоры достаточно найти проекции на оси декартовой системы координат главного вектора системы сил, в которую входят активные силы F,, реакция опоры Rq и силы инерции точек тела. Главный вектор сил инерции тела Л = -Ма = -M(sxr, +coxV(.). (17.29) 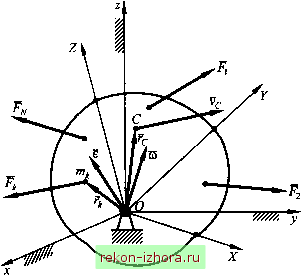 Рис. 17.3 Для определения проекций вектора на оси декартовой системы координат представим входящие в (17.29) векторные произведения в виде определителей
Раскрывая эти определители по элементам первой строки и принимая во внимание, что v, =юхг(, =7(cOj,Z(. -cozr) Лгг ~ находим R =М[(со. +coj) +(8 -(дхЩ)Ус -(z -cO;,co)Z,.]; =М[{аГу +со )Г(. +(8; -щау)! -{г +щах)сЬ (17.30) RT =М[(СО +C0P)Z(. +(8 -СОа);). -(8; +©0))7;]. Выражения (17.30) справедливы для проекции главного вектора сил инерции тела на оси как неподвижной Oxyz, так и свя- занной OXYZ с телом систем координат. Проецирование вектора на связанные с телом оси координат предпочтительнее, так как распределение массы тела относительно таких осей фиксировано, и, следовательно, координаты центра масс - некоторые постоянные величины. В соответствии с принципом Даламбера система сил, включающая активные силы, реакцию опоры и силы инерции точек тела, уравновешена. Поэтому равны нулю проекции на оси координат главного вектора этой системы сил, т. е. ХоЪ +М(С0 +G))X,. +(8, - jj -C0;0)y)7f. -(8г -o);co)Z(.] = 0; -cOj,co)Z<.. -(8 +сО),сОд)ЛГ(.] = 0; Уравнения (17.31)-(17.33) позволяют вычислить реакцию опоры (сферического шарнира), если известны угловая скорость и угловое ускорение тела. Динамическая реакция опоры определяется силами инерции и может быть найдена с помощью уравнений (17.31) - (17.33) при условии, что все = 0. 17.5. Статическая и динамическая уравновешенность твердого тела, вращающегося вокруг неподвижной оси Статическая уравновешенность Твердое тело, вращающееся вокруг неподвижной оси, называют статически уравновешенным, если ось вращения проходит через его центр масс. В этом случае главный вектор сил инерции равен нулю, и из уравнений (17.23) и (17.24) получаем = -Х, = -Y. Это значит, что = -R, т. е. динамиче-
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |