

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Таким образом, при любом движении механической системы главный вектор сил инерции равен взятому со знаком Минус произведению массы системы на ускорение центра масс: К.=-Ма,.. (17.9) Главный момент сил инерции относительно произвольно выбранного центра приведения Определим главный момент сил инерции относителЕ>но некоторого неподвижного центра О: =1 =1 к=\ * dv, d Так как х -= - {г х ), то dt dt тш d -~7t dKo dt Следовательно, главный момент сил инерции относительно неподвижного центра приведения О равен взятой со знаком минус производной по времени от главного момента количеств движения механической системы относительно того же центра. Если движение точек механической системы рассматривать как сложное, т. е: = F. + р, то где АГ = X X кк - главный момент количеств движения системы в ее относительном движении по отношению к системе координат, движущейся поступательно вместе с центром масс. В этом случае главный момент сил инерции относительно неподвижного центра приведения О L-=- = --Mr,.a,. (17.10) Силы инерции точек механической системы можно привести к центру масс, который может быть подвижной точкой. В этом случае главный момент сил инерции относительно центра масс С 1=- (17.11) (производная в (17.11) полная, поскольку угловая скорость подвижной системы координат равна нулю). Формулы (17.9) и (17.10) дают возможность определить главный вектор и главный момент сил инерции твердого тела при разных видах его движения. При поступательном движении тела силы инерции его точек эквивалентны равнодействующей, геометрически равной главному вектору Л --Ма и приложенной в центре масс тела. Главный момент сил инерции относительно центра масс тела равен нулю, так как равна нулю скорость каждой точки тела относительно его центра масс (v = О). При приведении сил инерции точек тела, вращающегося вокруг неподвижной оси, к произвольному центру О, расположенному на этой оси, в центре О в общем случае должны быть приложены главный вектор R=-Ma и главный момент ---~ ил инерции. Если ось Oz вращения тела является его центральной и главной осью инерции, то Л = О, а Если твердое тело имеет плоскость Оху материальной симметрии и совершает плоскопараллельное движение, то, приведя силы инерции к центру масс тела, получим главный вектор R =-Ма и главный момент относительно центра масс сил инерции. При принятом допущении о наличии плоскости симметрии ось Cz будет главной центральной осью инерции тела и поэтому i =-УД. 17.4. Динамические реакции опор Одной из задач динамики твердого тела, для решения которой эффективно применение метода кинетостатики, является задача определения реакций опор и уравновешивания тела, вращающегося вокруг неподвижной оси. Вывод уравнений для определения реакций опор Рассмотрим твердое тело, закрепленное при помощи подшипника в точке В и подпятника в точке А (рис. 17.2), вращающееся вокруг неподвижной оси AZ под действием сил F 2.....Fy , и определим реакции опор. Масса тела М, его угловая скорость и угловое ускорение в некоторый момент времени соответственно равны ю и 8, трением в опорах пренебрегаем. 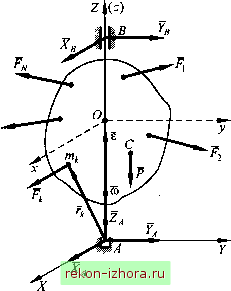 Рис. 17.2 Уравнения для определения реакций опор можно составить в проекциях на оси как неподвижной, так и подвижной системы координат, жестко связанной с вращающимся телом. В первом случае при вращении тела будет изменяться распределение массы, а значит, и моменты инерции тела относительно осей координат. Во втором случае моменты инерции тела относительно осей связанной с ним системы координат и координаты центра масс
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |