

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 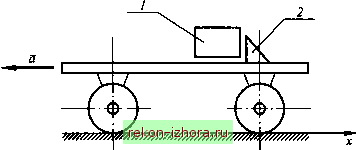 Рис.17.1 17.2. Принцип Даламбера для механической системы Рассмотрим механическую систему, состоящую из N материальных точек. Применяя принцип Даламбера к каждой точке системы, получаем +Ф, =0, = l,2,...,iV, (17.4) где =-т,а/; и - равнодействующие активных сил и реакций связей, приложенных к к-й точке. Условие (17.4) можно представить в виде (F O,)co0, * = l,2,...,iV. Таким образом, для системы материальных точек принцип Даламбера формулируется так: при движении механической системы в любой момент времени приложенные к каждой точке системы активные силы и реакции связей вместе с силами инерции образуют систему сил, эквивалентную нулю. Суммируя левые части уравнений (17.4) по всем точкам системы, получаем 1*+1;*+1ф*=о. (17.5) Умножив каждое уравнение в (17.4) векторно слева на радиус-вектор, к-й точки и просуммировав их, имеем £Мо(,) + £м (Л,) + ХЛо(Ф*) = 0. (17.6) Л=1 Л=1 *=1 Из (17.5) и (17.6) следует, что равны нулю главный вектор и главный момент относительно произвольного центра приведения О активных сил, реакций связей, приложенных ко всем точкам механической системы, и сил инерции. В проекциях на оси декартовой системы координат, начало которых совпадает с центром О, эти условия принимают вид известных уравнений равновесия произвольной пространственной системы сил: N N N =1 к=\ к=\ N N N А:=1 А:=:1 Л=1 f М л ) + f (Л,) + f л/, (Ф, ) = 0; Л=1 к=\ к\ Х (F,) + X Л/, (Л,) + f Л/Л Ф, ) = 0; к=\ Л=1 Л=1 tAFk)-tARk)-tAk) = o. (17.7) Л=1 Л=1 Л=1 Если силы, приложенные к -й точке системы, разложить не на активные и реакции связей, а на внешнюю и внутреннюю , то уравнение (17.4) примет вид Так как главный вектор и главный момент относительно произвольного центра приведения внутренних сил системы равен нулю, то для (17.5) и (17.6) имеем соответственно Z Ft + i = 0; Е iFt) + i (Ф.) = о. (17.8) =1 Ы\ Ы\ Проецируя (17.8) на оси декартовой системы координат, получаем шесть уравнений равновесия системы сил, аналогичных уравнениям (17.7). Особенность этих уравнений состоит в том, что в них не входят внутренние силы. Понятие о силе инерции и принцип Даламбера составляют основу метода кинетостатики, который ставит своей целью применение методов статики, в частности, к задачам динамики машин и механизмов. 17.3. Главный вектор и главный момент сил инерции Применяя принцип Даламбера для изучения движения механических систем, состоящих из многих или множества (например, твердое тело) точек, силы инерции целесообразно привести к какому-либо центру, например центру масс. Получим общие формулы для главного вектора и главного момента сил инерции относительно произвольно выбранного центра приведения. Главный вектор сил инерции В соответствии с определением главного вектора I ак как ускорение точки а, = - ® масса постоянна, то =-м- Гц \ dr, dt 2 303aic16
|
|||||||||||||
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |