

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика 16.3. Общий случай движения твердого тела В общем случае движения твердое тело имеет шесть степеней свободы. Поэтому для исследования его движения необходимо располагать шестью независимыми дифференциальными уравнениями динамики для шести обобщенных координат, задающих положение тела в инерциальной системе отсчета. Окончательный вид уравнений зависит от выбора обобщенных координат и теоретических основ, используемых для вывода. Введем инерциальную систему координат Sq с осями Ох, Оу, Oz. а также жестко связанную с твердым телом систему S с ортогональными главными осями инерции СХ, СУ, CZ в его центре масс (рис. 16.21). Обобщенными координатами могут служить три декартовы координаты х-,у , центра масс твердого тела в системе Sq и три угла Эйлера 14/, 0, ф, задающих положение системы 5, относительно осей Кенига, параллельных осям системы Sq . 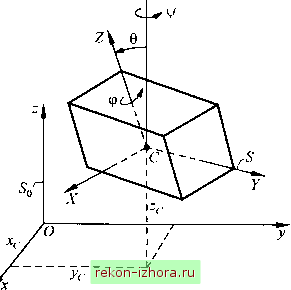 Первые три уравнения динамики составим на основе теоремы об изменении количества движения. Спроецируем векторное выражение этой теоремы на оси системы Sq : Мх, =tF; My,=fF,f; Mz, =f . (16.58) k=\ k=\ k\ Вторые три уравнения динамики составим на основе теоремы об изменении главного момента количеств движений относительно осей Кенига. В проекции на подвижные оси системы S динамические уравнения Эйлера имеют вид (16.11). Уравнения (16.11), (16.58) легко разрешимы относительно первых производных от проекций вектора скорости центра масс на оси системы Sq и проекций вектора угловой скорости тела на оси системы S. Такую форму записи дифференциальных уравнений несложно преобразовать к форме Коши, традиционно используемой в алгоритмах численного интегрирования уравнений. Дополним уравнения (16.11) системой кинематических уравнений Эйлера (4.8), позволяющих выразить проекции угловой скорости вращения тела на оси системы S через углы Эйлера и их первые производные по времени. Рациональность выбора указанных обобщенных координат состоит в том, что они позволяют представить общий случай движения в виде составного и в связи с этим разделить дифференциальные уравнения на две подгруппы (16.58) и (4.8), (16.11), не связанные между собой по вторым производным от обобщенных координат. Тем не менее такая система уравнений в общем случае является связанной, поскольку главный вектор R и главный момент L[ внешних сил относительно центра масс могут зависеть не только от времени, но и от полного набора обобщенных координат и их первых производных по времени: jie) =f/ ) =Ф,(/,лс,д;,2с,Лг>с.г.Ч.6Ф.Ч.6.Ф); = Y {F ) = Ф2 . Ус К- Ус. . V. 9. Ф. Ч. 6. Ф). Например, при движении тела, подвешенного к неподвижному основанию на пружинах, силы натяжения пружин зависят от положения центра масс и пространственной ориентации тела, а моменты этих сил относительно главных центральных осей инерции - от пространственной ориентации тела. Для каждого локального участка поверхности тела распределенные силы сопротивления воздуха зависят от скорости движения этого участка, которая, в свою очередь, определяется скоростями изменения всех обобщенных координат. Поиск аналитического решения системы нелинейных дифференциальных уравнений (4.8), (16.11) и (16.58) двенадцатого порядка представляет собой сложную, в большинстве случаев неразрешимую математическую проблему. Поэтому на практике решение задач динамики общего случая движения твердого тела выполняют численными методами. Систему дифференциальных уравнений (4.8), (16.11), (16.58) можно применять для любых частных случаев движения с меньшим числом степеней свободы. При этом в число неизвестных функций помимо обобщенных координат будут входить характеристики реакций со стороны соседних твердых тел. Например, при вращении тела вокруг неподвижной оси неизвестными будут законы изменений угла поворота тела и реакций подшипников. Вначале рассмотрим случай, когда соседнее твердое тело неподвижно. Если связь с ним принадлежит к числу идеальных (без учета сил трения), то дифференциальные уравнения движения следует дополнить уравнениями ограничивающей поверхности (в частных случаях линии или точки), записанными в обобщенных координатах. Если при этом необходимо также учитывать силы сухого трения и моменты трения качения и верчения, то дополнительно следует использовать уравнения математических моделей фрикционных сил и моментов. В тех случаях, когда соседнее тело подвижно в Sq , возможны два варианта: 1) движение соседнего тела заранее известно и задано в обобщенных координатах; 2) движение соседнего тела неизвестно и подлежит расчету. Второй вариант обобщает исходную задачу на случай движения кинематически связанной системы твердых тел. В каждом из этих вариантов дополнительные уравнения геометрической связи и моделей фрикционных сил следует выразить зг 467
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |