

|
|
Разделы сайта
Читаемое
Обновления Jul-2025
|
Промышленность Ижоры --> Теоретическая механика Этот пример является лишь наглядной иллюстрацией регулярной прецессии. Не следует думать, что для реальных конусов с произвольными углами при вершинах вектор А; подвижного тела будет направлен по оси неподвижного конуса, поскольку угол а не может быть произвольным. 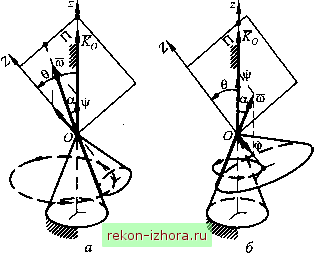 Рис. 16.7 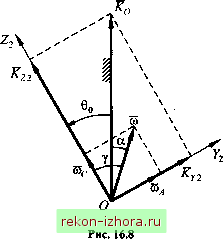 Соотношения (16.32) существенно упрощаются при есосо =0. Покажем, что в этом случае регулярная прецессия вырождается в стационарное вращение тела вокруг неподвижной оси Oz, совпадающей по направлению с вектором , причем с этой осью будет совпадать и одна из осей системы S. Убедимся, что при а = const вектор ш имеет постоянное направление. В начальный момент, когда вектор ш направлен по какой-либо главной оси инерции тела (сосо =0), векторы W и Kq параллельны, поэтому а = О и в дальнейшем а = О, т. е. вектор о5 неподвижен. Следовательно, движение тела представляет собой равномерное вращение вокруг неподвижной главной оси инерции*. Исследуем влияние начальных условий на поведение углов Эйлера при стационарном вращении. Рассмотрим два возможных случая, когда ось динамической симметрии OZ совпадает с осью Oz (рис. 16.9, а) и перпендикулярна ей (рис. 16.9, б). Вариант тела с шаровым эллипсоидом инерции (е = 0) отнесем к первому случаю. Z(z) 00=0  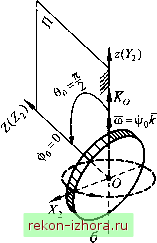 Рис. 16.9 * Примечательно, что такое движение может иметь тело с любой формой эллипсоида инерции в точке О. При этом вращение тела вокруг главной оси инерции со средним значением осевого момента инерции неустойчиво. При 00 =0 (см. рис. 16.9, а) со = О и со ;=со. Поэтому, согласно (16.32) и (16.33), vj/o =(1 + )со; Фо =-е(0. Отметим, что при sin ©о =0 кинематические уравнения Эйлера имеют вырожденный вид независимо от того, для каких осей (системы S() или S) они записаны, и без учета соотношения (16.33) не имеют однозначного решения. При 00 =я/2 (см. рис. 16.9,6) со =со и со. = 0. Поэтому, согласно (16.32), vj/o =со, Фо =0. Рассмотренные случаи стационарного вращения нашли применение в гироскопических приборах для решения задач навигации благодаря естественной способности динамически симметричного твердого тела с одной неподвижной точкой О при условии Lq = О сохранять в инерциальном пространстве направление главной центральной оси инерции без приложения каких-либо управляющих сил, если сообщить телу вращение только вокруг нее. Наглядным примером может служить многовековая стабильность направлений осей суточного вращения у планет Солнечной системы по отношению к эклиптике. Этим объясняется периодическая смена времен года на континентах Земли. Заметим, однако, что при Lq = О таким же свойством обладают любые оси любого твердого тела, если это тело до начального момента времени не имело вращения относительно инерциального пространства. Преимущество первого технического решения перед вторым состоит в том, что при нестрогом соблюдении условия Lq = О направление оси вращения будет тем более стабильным, чем больше первоначально заданная угловая скорость. Указанное свойство центральной оси динамической симметрии вращающегося одиночного тела при Lq ф О пояснено ниже. Случай Лагранжа. Тяжелый волчок К случаю Лагранжа относят движение твердого тела с одной неподвижной точкой О в однородном поле силы тяжести при
|
|
© 2003 - 2025 Prom Izhora
При копировании текстов приветствуется обратная ссылка |