

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика (16.4) а также подвижную систему координат CXYZ, имеющую начало в центре масс тела и перемещающуюся относительно системы Oxyz поступательно, причем плоскости CXY и Оху указанных систем координат будем считать совпадающими с плоскостью, в которой движется центр масс тела (рис. 16.2). Теорема об изменении главного момента количеств движения в относительном движении по отношению к центру масс для твердого тела в проекции на ось CZ подвижной системы координат выражается уравнением (15.64) в котором главный момент количеств движения тела в его относительном вращении вокруг оси CZ подвижной системы координат Здесь - момент инерции тела относительно оси CZ, проходящей через центр масс перпендикулярно плоскости движения тела. 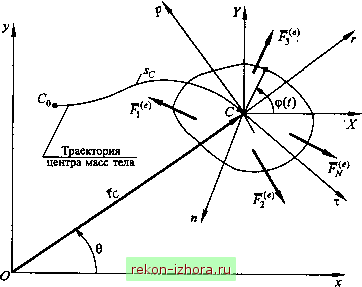 Следовательно, дифференциальное уравнение, описывающее вращение твердого тела относительно оси CZ, имеет вид Jczip = tcz(Fk)- (16.5) Дифференциальные уравнения (16.4) и (16.5) полностью описывают плоское движение твердого тела. Векторное уравнение (16.4) можно записать в проекциях на оси любой инерциальной системы координат. Так, в проекциях на оси ОхиОу декартовой системы координат получаем mXc=tFL yc=tFP- (16-6) в проекциях на оси полярной системы координат имеем m(r,-re) = fF:; m(rcd + 2rc) = fFP , (16.7) где и 0 - полярные координаты центра масс тела в неподвижной системе отсчета (на рис. 16.2 полярная ось совмещена с осью Ох, а полярная координата = ОС = г; ). Наконец, в проекциях на касательную и нормальную оси естественной системы координат уравнение (16.4) принимает следующий вид: msc=tn-, т = Ъ1- (16.8) ы\ Р ы\ Здесь = s (t) - закон движения центра масс по траектории (на рис. 16.2 начало отсчета принято в точке Cq ); р - радиус кривизны траектории центра масс тела. Системы уравнений (16.5) и (16.6), (16.5) и (16.7), (16.5) и (16.8) называются дифференциальными уравнениями плоского движения твердого тела в соответствующей системе координат. Начальные условия в общем случае можно задать, например, так: при ( = ( =о> Ус =Уо* Ф = Фо> =К Ус =Уо> Ф = Фо. =Го, 0 = 00, Ф = Фо, с =о. 6 = 00. Ф = Фо. Sc =5о, Ф = Фо, =0. Ф = Фо-в зависимости от числа степеней свободы тела для описания его плоского движения можно использовать от одной до трех обобщенных координат, при необходимости выражая через них координаты, используемые в приведенных выше уравнениях и начальных условиях. Пример 16.2. Однородный цилиндр массой т с горизонтальной осью и радиусом г начинает катиться из состояния покоя по шероховатой поверхности, имеющей на первом участке цилиндрическую форму с радиусом R, а на втором участке плавно переходящей в наклонную плоскость с углом наклона к горизонту tto (рис. 16.3). В начальный момент времени центр масс цилиндра находился в точке Со и линия СоО, составляла угол р с вертикалью. Определить: 1) минимально возможный коэффициент трения скольжения цилиндра о поверхность, чтобы его качение происходило без проскальзывания; 2) закон движения центра масс цилиндра по наклонной плоскости, принимая на всем участке движения цилиндра коэффициент трения скольжения / > . Трением качения пренебречь. 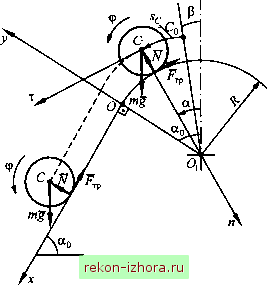
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |