

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Задание движения точки в прямоугольной декартовой системе координат Прямоугольная декартова система координат с началом в точке О и осями Ох, Оу, Oz показана на рис. 1.3. Положение точки М в пространстве с использованием данной системы координат задается ее координатами х, у, z. Чтобы знать положение точки в пространстве в любой момент времени необходимо иметь уравнения движения точки в виде x = x{t), y = y{t), z = zit). (1.6) 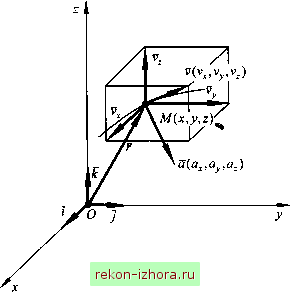 Рис. 1.3 Выражения (1.6) представляют собой уравнения движения точки в декартовой системе координат и одновременно являются уравнениями траектории точки, записанными в параметрической форме, где параметром является время /. Чтобы найти уравнение траектории в форме непосредственной зависимости между координатами х, у, z, из системы уравне- НИИ (1.6) необходимо исключить время. В таком случае траекторию будет определять, например, система уравнений вида /,(...)=о, Л(х,г) = 0. Следовательно, траектория представляет собой линию пересечения цилиндрических поверхностей, уравнения котор>1х составляют систему (1.7). В частном случае задания движения точки на плоскости Оху, например в виде уравнений движения х = x{t), у = y(t), уравнение траектории будет Пх,у)-о. (1.Г) Следует также заметить, что траекторией точки может быть не вся кривая, описываемая (1.7) или (1.7*), а только ее часть, соответствующая физически реализуемому процессу и положительным значениям времени /. Проведем из начала декартовой системы координат (см. рис. 1.3) радиус-вектор г точки Ми выразим его через координаты точки и орты i,j,k этой системы координат, составляющие ее векторный базис. С учетом уравнений (1.6) будем иметь r=x(i)i+y(Oj + z(t)k. (1.8) Из (1.8) следует, что координаты точки есть проекции ее радиус-вектора на оси декартовой системы координат, т. е. х = г1, y = rj, z = rk, (1.9) Соотношения (1.8) и (1.9) устанавливают взаимный переход от задания движения точки в декартовой системе координат к векторному способу и наоборот. На основании (1.1) и (1.8) скорость точки, при задании ее движения в декартовой системе координат, определится так: V = = x{t)i + y{t)j + z{t)k . (1.10) В (1.10) производные x,y,z, т. е. коэффициенты при i,j\k, имеют смысл проекций скорости точки на оси декартовой системы координат. Действительно, v,=v-i=m, Vy=vj = y(tl v,=Vk=z(t). (1.11) Таким образом, в рассматриваемом случае скорость точки представляет собой сумму составляющих векторов, параллельных осям декартовой системы координат: где = v/ v. = Vyj\ V, = v, , a ее численное значение (модуль) определится по формуле Представление о направлении вектора v можно получить по значениям направляющих косинусов углов, которые составляет этот вектор с осями декартовой системы координат: cosa = v/v, cosP = v/v, cosy = v,/v. Здесь а, p. Y - углы, которые составляет вектор v с осями Ох, ОуиОг соответственно. На основании (1.3) и (1.8) формула для расчета ускорения примет вид a = F = mi + ml + тк , (Ы З) проекции ускорения на оси декартовой системы координат будут a=:ai =x = v/,ay=a]=y = Vy; а=а-к =zv, (1.14) составляющие ускорения, параллельные осям координат, определятся как =aj;ay =ayj;a2 aic, а численное значение ускорения будет равно модулю вектора а : a = \a\ = al \а\ л-а\ . (1.15) Представление о направлении ускорения можно получить по значениям направляющих косинусов углов, которые составляет вектор а с осями декартовой системы координат: cosa = a/a, cosP = a/(2, cosy = а J а . Проекцию ускорения на ось, совпадающую по наЬравлению с вектором V , для определения характера движения точки (т. е. ускоренно или замедленно она движется) можно в данном случае найти, согласно (1.4), в виде
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |