

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика mvdv =d f 7 Fvdt = F-( = dA(F), получим = dA{F). (15.93) Формула (15.93) выражает теорему об изменении кинетической энергии точки в дифференциальной форме: дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку. Разделив обе части уравнения (15.93) на Л, получим еще одну запись теоремы об изменении кинетической энергии точки: Интегрируя обе части уравнения (15.93) по криволинейной траектории от положения до Л/(см. рис. 15.29), имеем T-T,=A(F), (15.94) где Г, Го - кинетическая энергия точки в положении М и Mq соответственно. Формула (15.94) выражает теорему об изменении кинетической энергии в интегральной форме: изменение кинетической энергии точки на любом перемещении равно работе силы, действующей на точку, на том же перемещении. Теорема об изменении кинетической энергии для механической системы. Для механической системы, на которую действуют как внешние, так и внутренние силы, уравнение (15.93) можно представить в виде 2 Л = dA(F,) + dA{Fj% A: = l,2,...,iV. (15.95) Суммируя левые и правые части этих уравнений по всем точкам системы и вынося знак дифференциала за знак суммы, получаем = X dA{F!) + £ Д f/). (15.96) Формула (15.96) выражает теорему об изменении кинетической энергии системы в дифференциальной форме: дифференциал кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему. Разделим обе части уравнения (15.96) на dt. Тогда at к=\ ы\ Таким образом, первая производная по времени от кинетической энергии системы равна сумме мощностей всех внешних и внутренних сил, действующих на точки системы. Проинтегрируем каждое уравнение (15.95) по соответствующей ему криволинейной траектории от положения Л/о до положения Л/ . Просуммировав полученные выражения по всем точкам системы, имеем Г Го = X А{Щ) + X АЩ ). (15.97) где Го, Г- кинетическая энергия системы в начальном и текущем положениях соответственно; A{Fi)= jf/-iir, A(F,) = = Jf/ dr - соответственно работа внешней и внутренней силы, действующей на к-ю точку системы при ее перемещении по соответствующей криволинейной траектории из начального положения Мо в положение Л/. Формула (15.97) выражает теорему об изменении кинетической энергии системы в интегральной форме: изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек приложения этих сил. Пример 15.7. К кривошипу OA эпициклического механизма, расположенного в горизонтальной плоскости (рис. 15.34, а), приложен постоянный вращающий момент L Масса кривошипа т масса подвижной шестерни 2. К подвижной шестерне приложен постоянный момент сопротивления М. Считая кривошип тонким однородным стержнем, а подвижную шестерню однородным круглым диском с радиусом , определить угловую скорость кривошипа в зависимости от угла его поворота. Радиус неподвижной шестерни г,. В начальный момент система находилась в покое. 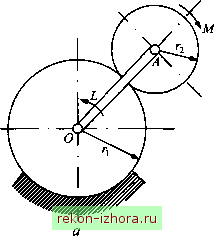 с F  Рис. 15.34 Решение. Запишем теорему об изменении кинетической энергии в интегральной форме (15.97) для рассматриваемого механизма: 7--7о=14* +14 (15.98) (Го = О, так как движение начинается из состояния покоя). Кинетические энергии кривошипа и подвижной шестерни соответственно равны где Уа, =(l/3)m,(r, +Г2) J -(У2)тг . При обкатывании подвижной шестерни по неподвижной точка их контакта является МЦС подвижной шестерни. Следовательно, =0>О(1+2) = 0>22- (15.99) Таким образом, кинетическая энергия механизма при вращении кривошипа
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |