

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика (траектории) в точке М (рис. 1.2, б)*. В итоге можно сделать заключение, что вектор а лежит в соприкасающейся плоскости траектории в точке М, причем направлен он всегда внутрь вогнутости траектории точки в этой плоскости. Годограф скорости 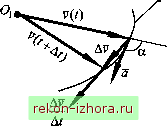 Траектория точки 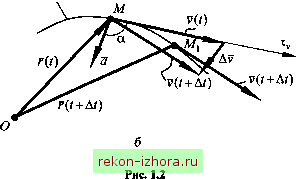 Если траектория точки является плоской кривой, то соприкасающаяся плоскость совпадает с плоскостью, в которой лежит траектория точки. Таким образом, ускорение точки а есть векторная физическая величина, равная первой производной по времени от скорости * Геометрически соприкасающаяся плоскость определяется как предельное положение плоскости, образованной касательньшш к кривой в точке Л/ и в соседней точке М, при неограниченном сближении этих точек. точки или второй производной от радиус-вектора точки; вектор а расположен в соприкасающейся плоскости и направлен в сторону вогнутости траектории точки в этой плоскости; численное значение ускорения определяется модулем а . Единица измерения ускорения в СИ - метр на секунду в квадрате ( м/с ). Если при движении точки по траектории модуль скорости возрастает со временем (dv/dt>0%TO такое движение uashiBeLei:-ся ускоренным, причем, если dv/dt = const>0, то равноускоренным. Если же модуль скорости при движении точки уменьшается (dv/dt<0), то движение является замедленным, а при rfv/A = const<0 - равнозамедленным. В случае v(0 = const {dvldtQ) движение называется равномерным. Производную dvl dt можно интерпретировать как проекцию ускорения а на ось Мх, совпадающую по направлению с направлением скорости v (см. рис. 1.2, б). Эта проекция может быть найдена так: а = Пра = 5, где Xy=v/v - вектор, имеющий направление скорости, и модуль, равный единице. Тогда V flfv V 1 dv \ dv ау=а - =---=---= -. (1.4) V dt V 1 dt V dt Модуль проекции ускорения на ось Мх, равный а = dvldt, характеризует собственно изменение скорости по величине. Знак этой проекции определяет характер движения. Так, при ay,=dv/dt>0 (угол а между векторами а и v меньше 90°) движение ускоренное, при a=dv/dt<0 (угол а>90°) - замедленное, а при a=dv/dt = 0 - равномерное (vconst). В общем случае равномерного движения точки по прямолинейному участку траектории а = О, v = const; при равномерном движении по криволинейному участку траектории v = const, но const, поэтому a±v, аО. 13. Векторный способ задания движения точки Движение точки можно задать, если выразить ее радиус-вектор в некоторой системе отсчета в виде функции времени г=г(0. (1.5) Функция г(0 для определенности дальнейших рассуждений предполагается непрерывной, дважды дифференцируемой. Такое задание радиус-вектора точки предполагает наличие системы отсчета, но не конкретизирует ее. В данном случае траекторию точки можно определить как годограф ее радгсус-вектора, т,е. геометрическое место концов радиус-вектора г, изменяющегося во времени согласно зависимости (1.5). Определения скорости и ускорения точки при векторном способе задания движения соответствуют приведенным в § 1.1 и 1.2. Формулы для их выражения имеют вид (1Л)и(1.3). Векторный способ задания движения точки ввиду своей простоты и компактности широко применяется для введения основных понятий и кинематических характеристик движения точки, которые в дальнейшем используются в том числе и при других способах задания ее движения, а также в теоретическом изложении различных разделов курса. \Л. Координатный способ задания движения точки Для задания движения точки координатным способом необходимо ввести систему отсчета с некоторой системой координат и дать зависимости изменения координат точки в виде функций времени*. Эти зависимости называются кипнематическими уравнениями движения точки в соответствующей системе координат. Рассмотрим случаи задания движения тсчки в конкретных системах координат. * Функции, определяющие изменение координат во времени, во всех далее рассматриваемых случаях будут полагаться непрерывными, дважды дифференцируемыми.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |