

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика Здесь сумма внутренних сил, действующих на к-ю точку, приведена к равнодействующей F/ . Таким образом, главный вектор внутренних сил механической системы R = Xf/ =0. (15.4) Рассмотрим сумму моментов сил Fj/ относительно точки О. Используя выражение (15.1) и векторное равенство г, = Г2 + Л/ запишем = {r,-r,)xF,i=M,M,xF,f=0 (здесь векторное произведение равно нулю, так как векторы М2М, и Fy коллинеарны). Обобщая уравнение (15.5) для всех точек системы, имеем M (f;())+M(F,</)) = o,..., Суммируя уравнения (15.6) и применяя теорему Вариньона для равнодействующей силы F/ , получаем ;M,;(F/>) = 0. (15.7) Таким образом, главный момент внутренних сил механической системы относительно точки О равен нулю: Ll?-to(F,) = hx =0. (15.8) к=\ к=\ В проекциях на оси координат, согласно (8.6) и (8.10), имеем R=tF=0; R=tp=0; =iF)=0; (15.9) =1 к=\ к\ - ±Лт = 0; 4 = iA/F/>) = 0; *= (15.10) 15.2. Дифференциальные уравнения движения механической системы Рассмотрим движение механической системы, состоящей из Лоточек. Наточку Л/ массой системы действуют равнодействующая внутренних сил F/ и равнодействующая внешних сил F/ (рис. 15.2). 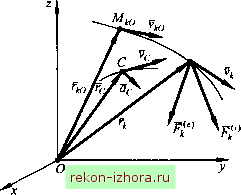 Рис. 15.2 Дифференциальные уравнения движения системы материальных точек в векторной форме имеют вид m, = FtFt\ (15.11) = F/>4-F/> ()t = l,2,...,A), где Vf - абсолютная скорость Л-й точки. Систему N дифференциальных уравнений называют дифференциальными уравнениями движения механической системы в векторной форме. В проекциях на оси инерциальной прямоугольной декартовой системы координат Oxyz получаем 3N дифференциальных уравнений движения механической системы: m,z,=F<:+F<;K Начальные условия имеют следующий вид: при / = to =-ло5 Ук =Ук09 к -ло к =-Л0> Ук -УкО к кО* Проинтегрировать систему уравнений (15.12) аналитически и даже численно очень трудно. Процесс интегрирования еще более усложняет то обстоятельство, что силы реакций связей, наложенных на систему, часто необходимо определять в процессе решения задачи о движении механической системы. Ряд задач небесной механики требует подробного знания движения точек во времени. Это задачи о движении двух, трех и более точек (тел) под действием сил тяготения. Здесь применимы уравнения (15.12). Для решения некоторых других задач необходимо систему уравнений (15.11) преобразовать так, чтобы в них содержались зависимости некоторых обобщенных мер движения (количества движения, главного момента количеств движения, кинетической энергии) от характеристик приложенных сил (главного вектора и главного момента относительно центра). Из таких уравнений часто удается исключить внутренние силы и найти необходимые решения, описывающие движение механической системы. Получают эти уравнения из закономерностей, описываемых общими теоремами динамики для механической системы: о движении центра масс, об изменении количества движения, об изменении главного момента количеств движения, об изменении кинетической энергии. Теоремы формулируют для инерциальных систем отсчета; если система неинерциальна, то это специально оговаривают. 15.3. Теорема о движении центра масс механической системы Запишем уравнения движения механической системы в виде a,=Ft+FP ik = \,2,-,N), (15.14)
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |