

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Теоретическая механика определяющая вращение вектора, и Hni (В.86)следует Аф I Поэтому из (В.87) В частном случае дифференцирования единичного вектора имеем (В.88) где PqIgq. Учитывая теперь, что и модуль, и направление вектора А изменяются, запишем его в ввде (В.74): AA(t)ao(t). Тогда производная вектора А по скалярному аргументу t может быть представлена двумя взаимно перпендикулярными векторами (рис. В.20): dA dA .da -=-+A-- dt dt dt (B.89) 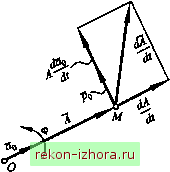 PncBJtO Очевидно, первый вектор в уравнении (В.89) направлен вдоль или. против вектора Щ и характеризует быстроту изменения вектора А по модулю. Согласно (В.86), .tjio вектор A- = A(o*Pq направлен dt перпендикулярно вектору А в соответствии с,его поворотом и определяет изменение вектора А по направлению. Следовательно, =ао+А(оро. (В.90) at dt Если вектор А остается параллельным некоторой неподвижной плоскости (т. е. годографом А является плоская кривая), то из (В.87) и (В.90) следует: dA dA- jd<a =-ao+APQ. dt dt Заметим, что равенство dt dA (B.91) имеет место лишь в слу- чае, когда направление вектора А не меняется. Раздел I КИНЕМАТИКА Кинематика - раздел теоретической механики, в котором изучается механическое движение тел без анализа определяющих это движение условий и причин (с геометрической точки зрения). Механическое движение, то есть изменение положения материального тела в пространстве, определяется по отношению к некоторому телу, которое называется телом отсчета. С телом отсчета связывают систему координат, в которой рассматривают перемещение исследуемого материального тела или системы тел с течением времени. Начало отсчета времени выбирают произвольно. Связанная с телом отсчета система координат с принятым в ней отсчетом времени образуют систему отсчета. Изучение механического движения в кинематике возможно на основе задания движения материальных тел. Задать движение материального тела означает указать способ или алгоритм, позволяющий однозначно определить положение рассматриваемого материального тела в выбранной системе отсчета в любой момент времени. В данном разделе будут рассмотрены главы по кинематике точки и абсолютно твердого тела. Простейшей моделью материального тела, размерами которого в условиях решаемой задачи можно пренебречь, является материальная точка. При этом в кинематике понятие материальной точки тождественно понятию геометрической точки. Абсолютно твердым, или просто твердым телам называется модельное представление материального тела в виде тела (системы материальных точек), в котором расстояние между любыми точками является неизменным.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |