

|
|
Разделы сайта
Читаемое
Обновления Jul-2026
|
Промышленность Ижоры --> Станки механосборочного производства Принято, что каждый микропроцессорный модуль должен вести два рабочая процесса. Далее принято, что при отказе одного микропроцессорного модуля система должна продолжать работать, а при выходе из строя двух модулей должна быть осуществлена безопасная остановка и установлена причина отказа. Один из вариантов раскрепления функций выглядит так. Модуль i: управляющая программа и привод подачи ; модуль 2: привод подачи и диагностика ; модуль 3: привод подачи ; модуль 4: автоматика станка . При выходе из строя модуля 1 потребуется реконфигурация системы путем передачи привода подачи и управляющей программы соответственно модулям 3 и 4. Интерфейсы должны быть соответственно автоматически переключены. Об отказе информируются ЭВМ и оператор. При выходе из строя модуля 2 целесообразно останавливать станок и для этого иметь все процессы привод подачи и процесс автоматика станка с тем, чтобы остановка была безопасной. После такой остановки должен быть возобновлен процесс диагностика для тщательной оценки ситуации. § 6. ПРИМЕНЕНИЕ АППАРАТА ТРАНСЛЯЦИИ К РАЗРАБОТКЕ МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ЧПУ Ранее было отмечено, что микропроцессорное устройство ЧПУ является виртуальной вычислительной машиной со структурами данных и алгоритмами, реализованными главным образом программным путем. Отдельные уровни виртуальности обозначены различными операционными средствами, функции которых состоят в трансляции вычислительной машины данного уровня на уровень Входные указания fia языке задач Входные указания на языке заданий Устройство как транспятор Объектный код упраЬпеиия приводапи Объектный код управления автопатикой Объектный код индикации и визуализации Рис. 25.9. Модель устройства ЧПУ в виде транслятора более низкий. Отсюда можно сделать предположение в возможности использования аппарата теории трансляции при разработке математического обеспечения того уровня виртуальности, который определяет проблемную ориентацию устройства ЧПУ. Подобная возможность следует и из соображений самого общего характера. В самом деле, числовое управление можно рассматривать как процесс перевода некоторых исходных указаний в выходной объектный код. При этом исходные указания Чформулированы на языке задач (управляющая программа) и на языке заданий (директивы панели оператора), а объектным кодом являются сигналы управления приводами подачи и электроавтоматикой, информационные блоки индикации и тексты визуализации (рис. 25.9, а также Рис; 25.10. Алгоритмы н структуры данных в аппаратном устройстве ЧПУ PQmoeiod 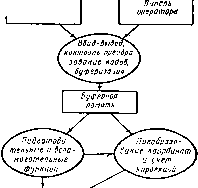
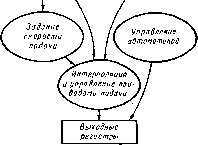 см. рис. 24.4). Определив формальным образом входные и выходные языковые средства, тем самым зададим условия для синтеза транслятора. Такая перспектива привлекает прежде всего возможностью построения (в том числе и автоматизированного) регулярной структуры математического обеспечения на основе однообразной, высокоэффективной и хорошо разработанной теории трансляции языков ЭВМ. Трансляторы, выполненные на основе специальных схемных решений, можно обнаружить и в аппаратном устройстве ЧПУ (рис. 25.10). Структуры данных организованы в виде специально выделенных регистров (регистры буферной и рабочей памяти, входные и выходные), а аппаратно-реализованные модули посредничают между регистрами, выполняя функции перевода внешних представлений на язык внутренних регистров, функции перевода с языка одних регистров на язык других. Для микропроцессорного устройства ЧПУ структура данных выглядит значительно сложнее и может быть задана информационным графом (рис. 25.11). Узлы графа являются зонами специально организованной памяти или векторами состояния и принадлежат структуре данных, а дуги должны быть нагружены процедурами (на рисунке не показанй), осуществляющими передачу и преобразование информации от одного узла к другому. Эти узлы сгруппированы по переходам (источники информации, информационные массивы источников, входные массивы и др.) таким образом, что переходы, расположенные левее, соответствуют более ранним этапам переработки информации. Охарактеризуем отдельные переходы подробнее. Источники информации. По своему происхождению входная информация отличается тем, что поступает в устройство ЧПУ с панели оператора с внешнего носителя по каналам обратной связи. По своему назначению эта информация может быть ориентирована на технологический объект (например, коррекции инструмента станка, константы станка, описанные функций электроавтоматики), на рабочий процесс (например, управляющая программа обработки деталей на станке, директивы с панели оператора), на множество рабочих процессов (типовые подпрограммы). По своей семантике входная информация отображает задачи (в составе управляющей программы в коде IS0-7bit), задания (с помощью некоторого подмножества директив о панели оператора), протекание процесса управления (в виде совокупности сигналов Истттяи Входной текст шет аецоторв ттчкезаЗоюа Ъкодкоа текст теттероторй квкзтезоЗт BxolKoi текст еиештго носите-тчатшезаНач ВхоШй текст на юте стшо-обрятноя.сИязь дхоВкоИ текст миеяи-завокоя Ш зяекяро-aSmommiiKu ВхоИноИ текст пянека-зявачи для злоктро- ВхоШО текст пв языке стакка-оевеВт сцгкояы -. я,/7д \ -1 6П,ВЗ j- -{ п.ки { - пж Y вп,ж I п,пос \ -j П.УП }-Гддг (-ГВлГ I п,т I -I мк J в.ьк \- -\ п.ВС }- - [isiim I-\П,ВЗЗЛ ПввЦ \-рШзГ\- П.ВВСЭ \- - 1,ВСиЗ -fgm I БИ.РИ П,вР!1 -\ 6П.0С I-1 /7.ддсз I-I п.вт в.ви ТвпГу ШпШл Рис. 25.11. Структура данных микропроцессорного устройства ЧПУ: Л - память; БП - буферная память; В - вектор; Б - буфер; ВУЗ - вектор управления заданиями; ПоС - поиск слова; ПрС - преднабор слова; ВЗ - ввод задач; СОС - сигналы обратное связи приводов подачи; 33А - задания для электроавтоматикн; РУ - ручное управление; ОС - осведомительные сигналы; УП - управляющие программы; КК - косвенная коррекция; Пп - подпрограммы; КИ - коррекция инструмента; ПС - параметра станка; ЯД - программа диагностики; ВЗЭА - вектор заданий для электроавтоматики; ВРУ - вектор ручного управления; ВОСЭ - вектор осведомительных снгиалов электроавтоматики; ВБК - вектор буферного кадра; ВОЦ - вектор операций цикла; ВОСЦ - вектор осведомительных сигналов; ВРК - вектор рабочего кадра; ВОС - вектор обратной связи; ВСЭА - вектор состояний электроавтоматики станка; ВИ - вектор индикации; ВК - вывод кадра; ВУП - вектор управления приводами; ВВСЭ - вектор выходных сигналов электроавтоматики станка; Д - дисплей; СИ - световая индикация; ВС - вывод символа; ВПО - вывод признаков отказов; УП - управление приводами; ВСиЭ - выходные сигналы электроавтоматики обратной связи приводов подачи и осведомительных сигналов электроавтоматики). По частоте входа входная информация подразделяется на однократно вводимую при стыковке с объектом (константы станка, описание функций электроавтоматики); вводимую периодически по мере надобности (коррекции инструмента); вводимую с каждым очередным заданием на исполнение рабочего процесса (задачи, задания); вводимую с высокой частотой в ходе исполнения )абочего процесса (сигналы обратной связи и оАедомительные). 1о возможности редактирования информация может быть непосредственно редактируемой (задачи, задания, описание электроавтоматики), косвенно редактируемой (задачи), нередактируемой (сигналы обратной связи и осведомительные). г; Информационные массивы источников. Эти массивы служат для приема внешней информации в определенном формате и заполняются аппаратно или программно. Структура вектора управления заданиями определяется множеством клавиш и переключателей, имена которых являются элементами словаря языка панели оператора. Команды кода IS0-7bit, если они вводятся для описания задач вручную с панели, поступают в память преднабора слова. Память преднабора используется при ручном вводе информации или редактировании, а память поиска слова - при редактировании. При вводе задач с внешнего носителя символы кода IS0-7bit попадают в буферную память ввода задач. Структура буферной памяти сигналов обратной связи определяется особенностями следящих приводов подачи у объекта (станка) и общим числом этих приводов. Буферная память электроавтоматики содержит описания заданий, задач, вводимых вручную при наладке (отдельные операции электроавтоматики, входящие в состав сложного цикла, задаваемого командой в коде IS0-7bit), осведомительных сигналов в унитарном представлении. Входные массивы. Центральную часть входных массивов занимают три зоны, отведенные управляющей программе, подпрограммам и корректуре программ. Программа косвенной коррекции загружается, наряду с основной управляющей программой, через фотоввод, с клавиатуры панели оператора или смешанным образом. В дальнейшем обе программы вступают во взаимодействие, в результате чего формируется скорректированная и оптимизированная рабочая программа; при этом, однако, исходные тексты сохраняются в памяти в неизменном виде. Память коррекций инструмента, память параметров станка заполнены константами. Программы диагностики относятся к специальному резидентному математическому обеспечению и предназначены для обнаружения отказов в аппаратной части при исполнении логических и вычислительных процедур, а также на уровне ввода информации. Задания и осведомительные сигналы электроавтоматики преобразованы из битного в байтное представление для более удобного обращения с информацией. Память вектора ручного управления является своеобразным буферным кадром электроавтоматики, вводимым с панели для ручного воспроизведения отдельных операций сложного цикла, имя которого определяется командой lS0-7bit. Промежуточные массивы. Целью формирования промежуточных массивов является предварительная подготовка управляющей информации, предшествующая команде начала ее отработки. Вектор буферного кадра является подготовительным фрагментом управляющей программы. Память вектора операций цикла электроавтоматики станка содержит имена отдельных операций сложных циклов электроавтоматики, задаваемых в кадре управляющей программы. В памяти вектора осведомительных сигналов цикла находятся адреса тех ячеек памяти вектора осведомительных сигналов электроавтоматики, в которых хранятся текущие состояния осведомительных сигналов, приданных данному циклу. Главные массивы содержат рабочую управляющую информации, обработка которой ведется в целях исполнения предусмотренных в управляющей программе задач. Вектор рабочего кадра сформирован к, началу его отработки, однако некоторые коррективы допустимы и в процессе отработки кадра. Вектор обратной связи служит для организации оперативного управления координатными следящими приводами подачи.Вектор состояния электроавтоматики отображает текущие положение или состояние всех механизмов электроавтоматики станка. Выходные массивы. Здесь складываются результаты вычислений и информационных преобразований, которые послужат в дальнейшем источником управляющих воздействий на объект (станок). Вектор управления приводами формируется по результатм интерполяционных расчетов и расчетов скорости подачи. Вектор выходных сигналов электроавтоматики содержит текущий набор управляющих команд, которые должны быть выданы объекту до прихода очередной серии осведомительных сигналов. Векторы индикации составлены из всех компонентов, которые необходимы оператору станка постоянно или могут заинтересовать его выборочно. Информационные массивы потребителей составлены из групп выходных буферных регистров, предназначенных для передачи информации внешним потребителям. Передача может быть организована аппаратно или программно. Потребители информации. Основным потребителем информации является объект управления (станок). Совокупность управляющих команд может быть квалифицирована как объектный код управления. Другими потребителями информации являются средства ви- зуалпзации - дисплей и световая индикацияя. Эти средства находятся на панели оператора усгройства ЧПУ. Как уже отмечалось, переходы от одного вектора состояния к другому осуществляются под действием процедур, которые обращаются к векторам состояния для чтения или записи. Программный модуль, соответствующий той или иной продедуре, можно рассматривать в качестве посредника между векторами либо между вектором и некоторым языковым представлением во внешнем ка.-нале. Это и позволяет конструировать модуль по типу транслятора, формализовать процесс конструирования, а во многих случаях и автоматизировать этот процесс. Отдельные программные модули-трансляторы могут быть объединены в крупные программно-математические блоки, которые организационно также могут быть построены по типу трансляторов. Примером подобного объединения может послужить приведенная ниже совокупность блоков. Блок диспетчера операционной системы ЧПУ объединяет логические связи, вытекающие из синтаксиса языка управления заданиями. Этот блок читает директивы панели оператора в векторе управления заданиями и организует автоматические циклы одного из режимов работы микропроцессорного устройства ЧПУ. Блок ввода-вывода управляющих программ и директив панели оператора формирует вектор управления заданиями, необходимый я работы диспетчера. Через специальные интерфейсные узлы блок связывается с периферийными устройствами. С помощью драйверов ввода блок вводит управляющую программу либо в память управляющих программ, либо в память косвенной коррекции, либо в память подпрограмм. Те же драйверы могут вводить числовые массивы в память коррекций инструментов или память параметров станка с перфоленты или панели оператора. Блок может также осуществлять запись информации в память вектора индикации или вывода кадра. Блок управления и подготовки памяти управляющих программ состоит из двух частей с разделением по основным и дополнительным функциям. Модуль основных функций выбирает текущий кадр из памяти управляющих программ, памяти косвенной коррекции или памяти подпрограмм с учетом признака пропуска кадра и записывает его информацию в память буферного кадра. Модуль дополнительных функций на стыке векторов буферного и рабочего каДров выполняет коррекцию на длину инструмента или на радиус инструмента (или с вводом переходных окружностей, или с учетом пересечения экви-дистант), осуществляет программируемые циклы и зеркальное отображение. Таким образом, кадр прежде чем попасть в память вектора рабочего кадра для исполнения, обрабатывается несколько раз, всякий раз подвергаясь трансляции. Блок интерполяции и управления приводами подачи осуществляет очередную трансляцию геометрической информации из вектора рабочего кадра, буферной памяти состояния обратной связи приводов в память вектора управления приводами с учетом параметров станка (например, корректур накопленных погрешностей ходового винта и т. д.). Блок технологических функций электроавтоматики транслирует технологическую информацию из памяти вектора рабочего кадра, буферной памяти осведомительных сигналов электроавтоматики в выходной вектор электроавтоматики. ГЛАВА 26 ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ МИКРОПРОЦЕССОРНЫХ УСТРОЙСТВ ЧПУ § 1. ВАРИАНТЫ УСТРОЙСТВ ЧПУ С ПОЗИЦИЙ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ Спектр функциональных возможностей современных устройств ЧПУ чрезвычайно разнообразен. С позиций функциональности все устройства можно укрупненно разбить на пять групп: устройства со стандартными фиксированными функциями; устройства с гибкими возможностями, устройства повышенной сложности на базе мини-процессора; массовый недорогой вариант; устройства с явно выраженной ориентацией на ручной ввод данных. Устройства ЧПУ со стандартными фиксированными функциями выпускают большими сериями, главным образом для токарной или
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |