

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Разработка конструкторской документации 17.3. Экспериментальные данные унифицированных сидений тракторов
17.4. Экспериментальные даииые эффективности сидений тракторов Т-150 и Т-150К
Как видно, подрессоренное сиденье на тракторе Т-150 обеспечивает высокую степень снижения низкочастотных колебаний на рабочем месте тракториста. На тракторе Т-150К результаты хуже. По-видимому, это объясняется местом расположения сиденья относительно упругих опор машины. Близость сиденья к передней подрессоренной опоре трактора, имеющей достаточно низкую частоту собственных колебаний, вызывает в некоторых режимах усиление колебаний на сиденье. В тракторе Т-150 сиденье установлено в средней части остова, колеблющейся в большинстве режимов с частотой собственных вертикальных колебаний, величины которых выше частоты колебаний передней подрессоренной части остова колесного трактора Т-150К- В последнее время появились попытки предложить метод расчета ускорений головы человека, т. е. ввести в рассмотрение модель, описывающую передачу колебаний от сиденья трактора к голове водителя. В качестве такой модели В. Н. Сиренко предложил нелинейную одномассовую систему с мягкой упругой характеристикой. Параметры системы: масса m = 5,8 кг-с/м, коэффициент демпфирования К= 115 кг-с/м, жесткость с = Cq + Y> где Сд = 6300 кг/м, Y = 3 -10 кг/м, А = Zp - Zc (здесь Zr, Zc - перемещения головы человека и сиденья трактора). Такая модель удовлетворительно описывает колебания человека в диапазоне частот от О до 10 Гц. Применяя метод статической линеаризации, нелинейную систему можно заменить эквивалентной линейной [4], модуль передаточной функции которой зависит от характеристик колебаний сиденья трактора, и рассчитать спектральную плотность ускорений головы водителя. Проведенные автором модели эксперименты в эксплуатационных условиях показывают, что вертикальные среднеквадратичные ускорения головы водителя отличаются от колебаний туловища - (0,7-0,8) 2т и сиденья машины - (l,2- 1,3) 2c и существенно зависят от положения водителя за рулем. Учет продолжительности воздействия колебаний выполняется по изложенной выше методике, но без приведения к эквивалентному режиму и непосредственно по среднеквадратичному ускорению головы водителя. При этом используются допустимые значения продолжительностей действия по данным ИСО. Приведение к эквивалентному режиму не следует делать потому, что учет в расчетной схеме передаточной функции приведения отражает тот же факт, что и коэффициенты приведения, а именно различную проходимость колебаний к голове человека в зависимости от их частоты. ГЛАВА 18 РУЛЕВОЕ УПРАВЛЕНИЕ 18.1. ТИПЫ ПРИВОДОВ и их КИНЕМАТИЧЕСКАЯ ХАРАКТЕРИСТИКА Рулевое управление служит для отклонения (поворота) направляющих колес относительно продольной плоскости трактора. Для получения чистого качения направляющих колес при повороте без скольжения рулевое управление должно обеспечить: пересечение осей колес в одной точке - центре поворота; перпендикулярность осей к касательным к траектории колес. Чтобы осуществить эти требования, внутреннее и наружное колеса нужно поворачивать на разные углы а и Р, связанные зависимостью ctgp-ctga = -, (18.1) где а и р - углы поворота внешнего и внутреннего колес соответственно; А - расстояние между центрами шкворней поворотных цапф: Л = В - 2 (а + /1ш tg Рш) [здесь В - ширина колеи; а - плечо обкатки колеса; hm - высота центра опоры шкворня в кулаке; Рш - угол поперечного наклона шкворня]; L - продольная база. Поворот двух направляющих колес выполняют при помощи следующих приводов: рулевой трапеции с одной цельной или двумя поперечными тягами или двух продольных тяг. Рулевая трапеция (рис. 18.1, а) определяется радиусом г поворотных рычагов и углами G их установки. Радиус г выбирают, учитывая, что длинные рычаги трудно разместить на тракторе, а короткие увеличивают усилие в поперечной тяге и ограничивают угол поворота. В существующих конструкциях А= (0,16-ьО,25) Лтщ. Угол G подбирают так, чтобы оси наружного и внутреннего направляющих колес при повороте пересекались в одной точке, лежащей на продолжении оси ведущих колес (в центре поворота). Наиболее просто подбор вести графически. При этом пользуются следующим методом; середину К передней оси (рис. 18.1, б) соединяют прямой с точкой f - проекцией центра С шкворня внутреннего колеса на заднюю ось. Продолжают оСь наружного колеса до пересечения с линией КР и полученную точку Е соединяют с точкой С - осью шкворня поворотной цапфы внутреннего колеса. Угол КСЕ равен требуемому углу а. Действительный угол а отличается от требуемого, поскольку трапеция не обеспечивает точного выполнения зависимости (18.1). Для проверки кинематики поворота для принятого угла G задаются различными углами а (проверяя одновременно не задевает ли подворачиваемое колесо за остов или другие детали трактора), а угол р находят графически или аналитически по формуле on, X rcoS(9 + a) Р = 9 -4- arctg------------ - arc sin A - г sin (9 -f a) / -f 2A sin 9 - 2r sin 9 - Л sin (9 -b ) VA-{-r-2Ar sin (9-+-a) Тшш приводов и их кинематическая характеристика  Рис. 18.1. Схема рулевой трапеции и ее характеристика: а - трапеция с задним расположением поперечной тяги; б - трапеция с передним расположением поперечной тяги; в - зависимость угла 6 от отиошеиия LjA; / н 2 - для задней поперечной тяги; 3 и 4 - для передней поперечной тяги; а-а - неточность угла поворота внутреннего колеса Предварительно угол 9 можно выбрать по зависимости L/Л (рис. 18.1, в) или рассчитать по формуле tg9=2 sin шах - sin Ршах 1 - (cos Ртах - COS шах) * (18.2) Изменение ширины колеи, предусмотренное для большинства тракторов, вызывает изменение отношения L/A и г/А. При уменьшении L/A требуется увеличение углов Она - р. Обычно устанавливают угол В для средней, наиболее употребительной колеи, допуская повышенный износ шин при ее изменении. Простая трапеция дает низкую точность кинематики поворота колес, с ухудшением ее при изменении колеи, и неравномерный поворот в разных направлениях Привод рулевой трапецией с двумя поперечными тягами имеет расположен ную между поворотными кулаками сошку, связанную отдельными тягами с равно плечими (рис. 18.2, б) или неравноплечими (рис. 18.2, а) поворотными рычагами Соотношения радиусов k л г сошки и поворотных рычагов, а также углы 9 подбирают графическим построением так, чтобы точки Е я Н пересечения осей колес со стороной 1 и продолжением стороны 2 базового треугольника, опирающегося на заднюю ось, располагались на равных отрезках ЕК и НК- При построении можно пользоваться аналитическими зависимостями, приведенными И. Б. Барским [3]. При изменении ширины колеи изменяется кинематика поворота (рис. 18.3). 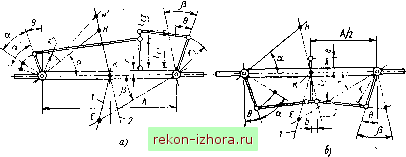 Рис. 18.2. Рулевое управление с двумя поперечными тягами: д - с несимметричными, расположенными спереди; в - о симметричными, расположенными сзади; / и 2 - сторона базового треугольника Рис. 18.3. Требуемая (/и 2) и фактическая (3 и 4) разности между углами поворота внутреннего а и наружного g направляющих колес трактора МТЗ-50 Рис. 18.4. Рулевой привод к двум поперечным тягам: а - продольной тягой; б - продольным валом сошки; в - продольным валом руля 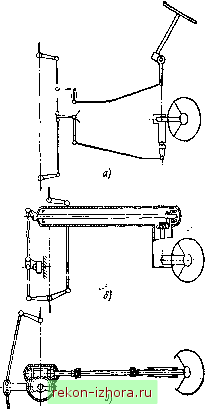 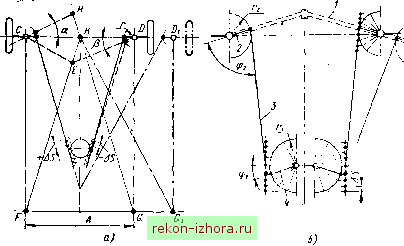 Рнс. 18.5. Схемы приводов с двумя продольными рулевыми тягами: а - тяги параллельны сторонам базового треугольника; б - тяги образуют с рычагами острый угол; / - передняя ось; 2 - поворотный рычаг; 3 - продольная тяга; 4 - сошка (условно повернута из вертикальной плоскости в горизонтальную) Привод К двум поперечным тягам (так же как и привод к рулевой трапеции) можно осуществить (рис. 18.4) продольной рулевой тягой, продольным валом сошки, продольным валом руля. Продольная рулевая тяга затрудняет навешивание сбоку трактора машин-орудий. Продольный вал сошки при большой длине имеет большой упругий угол закручивания, способствующий возникновению автоколебаний колес. Для исключения этого вал делают очень жестким, утяжеляя его. Подобный привод нашел применение только на некоторых легких самоходных шасси. При продольном вале руля рулевой механизм располагают перед двигателем. Вал сошки получается коротким и жестким. Вал сошки ставят вертикально, применяя гибкие муфты в валу руля или наклонно, тогда вал руля может быть цельным. Привод двумя продольными тягами выполняют двумя способами. По одному способу продольные тяги располагают параллельно сторонам KF и KG треугольника (рис. 18.5, а), опирающегося на заднюю ось. Если радиус г поворотных рычагов невелик, то нарушение параллельности при повороте будет также невелико и им можно пренебречь. При перемещении тяг на одинаковую величину AS внешнее колесо поворачивается на угол Р и продолжение его оси дает точку Е. Продолжение оси внутреннего колеса пересекается в точке Н с прямой HG. Так как треугольники КСН и КСЕ равны, угол КСН равен углу КСЕ (а). Расширение колеи увеличением основания треугольника KFG практически не нарушает параллельности тяг его сторонам, а следовательно, сохраняется требуемая кинематика поворота. При другом методе правую и левую сошки отклоняют назад от вертикали (рис. 18.5, б) и получают различные перемещения AS тяг при одинаковом угле поворота 6. Путем подбора (графическим построением) длин сошек, поворотных рычагов и их начальных углов можно получить необходимую кинематику поворота направляющих колес. Расширение колеи в этом случае также корректирует в необходимую сторону кинематику поворота. В ряде конструкций для сохранения длины продольных тяг переднюю ось делают изогнутой и выдвижные кулаки перемещают по касательной и окружности, описываемой концом продольной тяги.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |