

|
|
Разделы сайта
Читаемое
Обновления Jul-2026
|
Промышленность Ижоры --> Разработка конструкторской документации Осевая сила на передних колесах 1  У1 = L cos - (ms + /крРкр sin Y + ац. ± ±М )+/i2itga. Поворачивающая сила Условия возможности поворота: по отсутствию скольжения передних колес по отсутствию заноса и буксования задних колес Pi- Для обеспечения крутбго поворота применяют торможение отстающего ко леса до получения отрицательной силы Yn. Схема сил, действующих при повороте на трактор 4 X 4с шарнирной рамок, приведена на рис. 2.7, б. Касательные силы тяги переднего Pj и заднего Р мО; стов находят из соотношения Р, ~ Z, Из условия SP;t = 0, 1:Р,= 0и2УИ = 0 имеем: Si + /Hsa+(P/i + P/a)P + Ркр (р COS V + /кр sin Y) (- + ) - Ркр COS Y - Р/2 - Pfi cos ее sin а + Рпх- Моменты Msi, Л152 и силы Рщ, Рпа определяют по формулам (2.11) и (2.101 для соответствующих нагрузок на ось Zi, Z-i- Знак у /кр sin 7 берут в зависимости-от положения точки сцепки. Движение по окружности радиуса р без заиоса и: буксования возможно при условии Лр2 + (К,-Р,)2ф,2,; j/+OVbWPA- 2.5. ПРОВЕРКА ПОВОРОТЛИВОСТИ МТА С ГУСЕНИЧНЫМ ТРАКТОРОМ Кинематика поворота. Гусеничный трактор поворачивает вокруг мгновенного центра поворота О (рис. 2.8), положение которого определяется типом механизма поворота, распределением сил по длине гусениц и сцеплением гусениц с почвой. 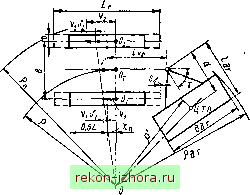 Рис. 2.8. Схема поворота гусеничного трактора Радиус поворота - расстояние от центра поворота до продольной плоскости симметрии трактора равен р = 0,5В X , Ml-63)+fi(l-6i) где и i теоретические скорости забегающей и отстающей гусениц, создаваемые .мехапизмо.м поворота (для большинства механизмов поворота = V - скорости прямолинейного движения; скорость tij переменная и для различных механизмов может иметь одно, обычно 1 = О или несколько значений, определяющих минимальный фиксированный радиус поворота рф); 6j и 62 - буксование забегающей и отстающей гусениц; если отстающая гусеница проскальзывает, ё- следует брать со знаком минус. Внешний радиус поворота трактора Рп 0,5 1/(2р + S f + (L, + 2х ) . Величины V и р находят по формулам (2.7), (2.8), (2.9). Длину поворота Sn и ширину поворотной полосы определяют по формулам табл. 2.9, приняв коэффициент поворачиваемости где Ут - момент инерции трактора относительно вертикальной оси, проходящей через точку, сохраняющую при повороте скорость прямолинейного движения v; при распсшожении этой точки на оси симметрии трактора = / = [L + + {B+b)\ в полюсе 02-/ = У = У + -27(й2 + 2). м .,-избы- точный поворачивающий момент: Мпл = Мп - Мрез; М - поворачивающий момент, определяемый по формуле (2.14); Л1рез - результирующий момент сопротивления повороту. Минимальный радиус поворота для агрегата с поднятым навесным орудием Pmin = РФ + Минимальный кинематический радиус поворота прицепного агрегата находят по формулам (2.6) и (2.5) с проверкой обеспечения зазора 55, исключающего задевание за отстающую гусеницу. Кинематика агрегата при маневрировании в междурядьях зависит от принятого типа навески орудия. При задней навеске, при повороте трактора от рядка защитная зона- ds (рис. 2.9) вначале уменьшается, а затем, после выпрямления трактора, увеличивается. Уменьшение ее при повороте трактора на угол е равно d,~% = 2/3 sin -- sin2 -- (2р -S ) 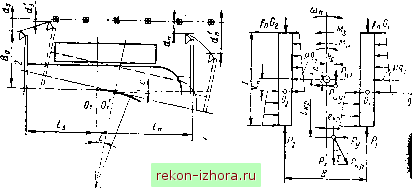 Г1п а маневрирования трактора Рис. 2.10. Силы и моменты, действую! с-вередней и задней навеской в междурядьях щие прн повороте гусеничного тракторе ИЛИ, если смещение центра От тракторавыразить не угловой, а линейной вели чииой е, то где 4 - вылет орудия; Во - ширина орудия. При передней навеске будет происходить увеличение защитной зоны тем большее, чем больше вылет 1 . Динамика поворота. При повороте МТА центр поворота смещается оти сительно середины опорных поверхностей гусениц на величину Хп (рис. 2.1 в результате действия смещающих моментов от продольных и поперечных с Продольная составляющая тягового усилия Рх = Ркр cos 7 вызывает с щение центра давления (ц. д.) на величину КрРх где йкр - высота линии тяги над почвой (высота прицепа); а - смещение центра тяжести относительно середины опорной поверхности гусениц (на рис. а о = о Поперечные составляющие тягового усилия Ру = Рр sin 7 и центробежной силы Рщ вызывают поперечное смещение центра давления hipPy - Ац. jP цу где /гц.т -высота центра тяжести трактора. Так как Ац, т > hp, обычно i/д отрицательно, т. е. смещается к забегающе гусенице. 1 В результате поперечного смещения центра давления изменяются нормалью ные реакции почвы на гусеницы: .-o.- (4-f);2.-<i. = o(4 + f). При действии только поперечных сил центр поворота сдвинется назад от оси, проходящей через середины опорных поверхностей гусениц: = Ру~Рцу finmaxG 2 где 1*п max - коэффициент сопротивления повороту (см. табл. 1.1). Обычно принято смещения выражать в безразмерных величинах, отнесенных к половине опорной длины гусеницы; 2д;д . 2ху ~ ~ ~L Смещение центра поворота в результате смещения центра давления и действия поперечных сил равно 3 ха Момент сопротивления повороту трактора Ms=k.. (2.12) где Цп - коэффициент сопротивления повороту, зависящий от радиуса поворота: (здесь а - коэффициент, колеблющийся в пределах 11п max f* а+(1-а)(Рв + 0,5) 0,8-0,9 для плотных почв и 0,75-0,85 для полевых (вспаханное поле, стерня); РВ-относительный радиус поворота: рв = р/В); kc - поправочный коэффициент момента сопротивления: = () + о) ( + оХо) - ЧХо- (2-3) Результирующий момент сопротивления повороту МТА равен Лрез = Ms + Мкр = Ms + Ркр Ц1кр - Хп) sin у - кр COS у]. Момент инерции при повороте определяют по формуле /И ==/твМп. где (Вп = .:L - угловое ускорение трактора при повороте, так к&к о>п = v/p, а скорость можно считать постоянной, то ~ d больших значениях р, характерных для широкозахватных агрегатов, моментом инерции можно пренебречь. Поворачивающий момент М = 0.5В [(Ра - Pi) + (f Gi - /пОа)]. (2.14) где /nGj, /пОг-силы сопротивления самопередвижению трактора; fn укоэф-фициент сопротивления самопередвижению при повороте: 1 + ю Уравнение поворота М = Мрез + Л4и. Касательные силы тяги при повороте при Л1 = О и /пОл = ( 0 = 0,5/ равны: на забегающей гусенице  Р, = f G, + 0,5Р, + = 0.5Р; + = (0.5 + V) р;; (2.15) на отстающей гусенице S Pi = fuGj, + O.SP;,--p. = (0,5 - V) Рк, (2.16): где Р - полная касательная сила: = 2 + 1= /п + Р*: = параметр поворота. Условия возможности поворота следующие. 1. Достаточность сцепления с почвой забегающей гусеницы BP.. PiVcGi, -7(1 +2г)фс. рез- :Л1пф = 0,5В(феО -Рк). 2. Отсутствие заноса Puj/- Ру 3. Отсутствие торможения отстающей гусеницы РхО; 0,5Рк: :0,5. Для выполнения условия PiO при повороте без тяги на крюке необходимо иметь Отношения ЫВ для некоторых тракторов следующие: Трактор Т-38М Т-54В Т-74 ДТ-75 Т-150 1,3 1,87 1,18 1,27 1,3 Т-4 Т-130 Т-108Б 1,77 1,33 1,22 4. Достаточность мощности (отсутствие заглохания) двигателя при увеличении нагрузки при повороте. Коэффициент увеличения момента к Л1рез Мт(йг (2.17)! где уИд, Л1к - момент двигателя, ведущих колес (принимают со штрихом прн повороте, без штриха при прямолинейном движении); у-скорость центра трактора: при повороте v = 0,5 (v + v); M-j - момент сил трения в тормозе или муфте; действует при регулировании радиуса поворота пробуксовкой муфты или тормоза; сОт - угловая скорость скольжения тормоза или муфты. Значения МтСОт можно приближенно найти путем следующих рассуждений. При v<0,5 и О < Pj <0,5Р; для муфты (тормоза планетарного ме- и (От=(У-yJX И---\Р.кгс ханизма) М- Р] (где б б передаточное конечной передачи). Мощность (л. с), затрачиваемая двигателем на буксование, МтСОт Pi(y -i) число д, дг(.. 3000 где t) - к. п. д. передачи к отстающей гусенице; т]ц 0,85. Прн V > 0,5 и Pj < О для остановочного тормоза 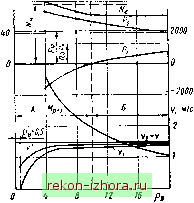 и (От = i 6 2000 г Рис. 2.11. Универсальная характеристика гусеничного трактора Т-74 прн повороте: А - зона управления -остановочным тормозом; Б ~ст зона управления муфтой поворота Мощность (л. С.) двигателя, затрачиваемая на торможение. Поворот трактора определяется типом механизма поворота, который задает скорости V2, 1 и величину поворачивающего момента. Для всесторонней оценки поворотливости МТА рекомендуется строить универсальную характеристику поворота (рис. 2.11), представляющую собой график зависимости Л4рез; Р2> Ри Уз; i; Ne= Ф (рв)- Характеристику строят для орудий и машин, не выключаемых на время поворота. Определяют минимальный кинематический радиус поворота рщп по формуле (2.6), а затем, задаваясь значениями pB>Pmin, последо- вательно находят р и у из выражения (2.7), скорости v =-- tijH tii = Рв + - Рв-0.5 п п . G V Уз, силы Рж= Ркр cosy; Ру = Ркр sin у; Рщ, = g Р Рв + 0,5 PK = fuG + Px. Вычислив коэффициенты ца и kc по формуле (2.26), определяют моменты Ms по формуле (2.12) и Мрез, касательные силы тяги на гусеницах Pj и Р из выражений (2.15), (2.16) мощность, теряемую в муфте Лд. ф нли тормозе Лд. т, коэффициент увеличения момента Хм по формуле (2.29) и достаточность сцепления с почвой забегающей гусеницы Pj фсг- При недостаточном сцеплении радиус по-. ворота увеличивается. Например, при повороте трактора Т-74 с тремя сеялками рв20, хотя Pmin = 4,8. Поэтому при работе с машинами, поворачиваемыми при наличии тягового сопротивления /?т, следует рабочую нагрузку устанавливать из условия 2(фе-0,5/)- Для повышения коэф()ициента использования мощности двигателя в этом случае увеличивают рабочую скорость.
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |