

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Динамика жидкости: уравнения Компоненты скорости задаются через УФ (11.50). В частности, граничное условие обращения в нуль нормальной составляющей скорости на поверхности тела принимает вид = -[/ sin а, + а/ 5 (1п r,j) ds = О, (14.4) /=1 где ak - наклон поверхности тела в k-й контрольной точке (обычно в середине k-й панели, рис. 14.2). Таким образом, уравнение (14.4) после вычисления интегралов представляет собой линейную связь между плотностями источников а/. В частном случае при k = j интегралы могут быть вычислены аналитически, а именно 5(1пг )Й5, = я. (14.5) k При j ф k интегралы могут быть выражены как функции узловых точек (xky Ук\ xj, yi). Конкретные формулы будут определены ниже (см. (14.13)). Уравнения (14.4), записанные в каждой контрольной точке, образуют систему линейных уравнений A0 = R, (14.6) где компоненты матрицы А и вектора R равны соответственно Aki = 0.56,; + J (In r,j) ds,-, (14.7) Rk = U sin ak, (14.8) Здесь a -вектор неизвестных плотностей источников. Для решения системы линейных уравнений (14.6) можно использовать лрямые или итерационные методы (гл. 6). После нахождения распределения плотности источников компоненты скорости, обусловленные внесением тела в поток, могут быть получены по формулам 1 х - х а полное поле скоростей определяется выражением q=(t/co + + м. V). Если компоненты скорости определяются в контрольных точках на поверхности тела, распределение давления по поверхности тела следует непосредственно из уравнения Бернулли Р - Роо =-(tT Типичное распределение давления приведено на рис. 14.4. Как видно, 23 элемента, расположенные на поверхности тела, позволяют получить очень хорошее совпадение с экспериментальными
0.00 0.10 0.Z0 0.30 ОАО 0.50 0.60 0.70 0.80 0.90 1.00 Х/С. Рис. 14.4. Распределение давления по поверхности профиля NACA-0012 npi а = 0° и Моо = 0.40. данными. Соответствие может быть даже улучшено, если перераспределить панели так, чтобы их число увеличилось в носовой части профиля и уменьшилось в центральной. Для лучшего соответствия имеющимся экспериментальным данным настоящий расчет модифицирован при помощи преобразования Прандтля-- Глауэрта, справедливого до Моо = 0.4. Введение этого преобразования в панельный метод описано в п. 14.1.6. Для многих задач решение (скорость или давление) необходимо определить лишь в контрольных точках. В этом случае-расчет (14.4) во многом повторяет расчет (14.9) и (14.10).- Поэтому Хесс [Hess, 1975] рекомендует следующую более эффективную процедуру. Сначала вычисляются v/г/=(i e/, /г/), вклады в компоненты скоростей (14.9) и (14.10) в контрольной точке (ХкУк), обус- 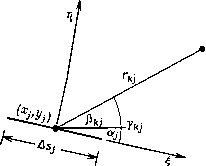 Рис. 14.5. Связанная с панелью система координат. ловленные источником единичной плотности на j-й панели. Уравнения (14.9) и (14.10) тогда принимают вид (Ч. Ук) = Е UkiOj, V {Xk, yk) = Е kir (14.11) Компоненты Ukj и Vkj могут быть выражены аналитически: ki = cos а. - ql. sin a t;,. = 9. cos a. + q{j sin a, (14.12) где /-(, + 0.5А5,) + лП Ч(,-0.5А5,)-Ьл> (14.13) Здесь А5/ - длина /-й панели, а (g, г]) -локальная система координат, расположенная на /-й панели (рис. 14.5). Если точка {Xk.yk) расположена далеко от точки (xj.yj), можно получить значительно более простую приближенную формулу [Hess, 1975]. Использование этой приближенной формулы практически не влияет на общую точность решения. В выражениях (14.13) qj и (7. - компоненты скорости, создаваемые в контрольной точке (Xk, Ук) источником единичной плотности, расположенным на /-й панели. Они направлены соот-
|
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |