

|
|
Разделы сайта
Читаемое
Обновления Jun-2026
|
Промышленность Ижоры --> Станочные гидроприводы 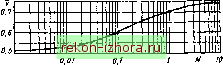 0,001 Рис. 10.5. График зависимости относительной скорости V движения цилиндра от показателя нагрузки N приводе должен производиться на основании анализа графиков из.менепия нагрузок во времени цикла (при прямом и обратно.м ходах). При заданных величинах хода s (мм), времени хода т (с), приведенной к поршню массы m (кг) и полезной нагрузки i, (Н) пара.метры цилиндра рекомендуется [18] выбирать последующей методике, обеспечивающей минимум энергетических затрат при трапецеидально.м законе движения. Определяют показатель нагрузки N = 0,002ms /(Tf ) и по графику рис 10.5 - относительную скорость v. Предельные значения скорости v (.м/мин) и ускорения а (м/с) определяют по формула.м: = 2,78.10 (v /60-T-0,001s) Внешняя нагрузка (Н) при разгоне F= nia +F и предельная .мощность (кВт) Р= l,67-10-\f. Задаваясь рабочим давление.м р (МПа), определяют диаметр (мм) цилиндра с учетом его КПД и потерь давления в гидросистеме D = 1,26\ р. Для цилиндров, имеющих скорость перемещения поршней свыше 18 м/мин (в точных станках свыше 8 м/мин), в конце хода следует предусматривать тормозные устройства, исключающие резкий удар о крышку. Различают два способа тор.можения: с контроле.м по времени и по пути. Б последнем случае (более надежно.м) тормозной эле.мент кине.матически связан с рабочим органо.м. Для исключения резких ударов прн торможении необходимо так подбирать параметры тормозных устройств, чтобы ускорение не превышало чаксимально допустимой величины а.. котор..я, например, max, ч/с  о 2 Ч е в Ю у. м/мин Рис. 10.6. Зависимость макси.чально допустимого ускорения Vmax при торможении от скорости движения V и соотношения между веса.чи подвижных (Спол) и неподвижных (Ост) частей станка для шлифовальных станков поданным Л. С. Столбова не должна превышать величин, указанных на рис. 10.6. В соответствии с упрощенной методикой [И] при установке на выходе из цилиндра тормозного золотника с конической формой рабочего элемента (возможны также треугольные или прямоугольные прорези на цилиндрическом золотш1ке) площадь проходного сечения дросселирующей щели (мм тормозного устройства в начальный момент торможения (рис. 10.7) 1 max / 2 , чальная скорость движения; а, .м/с , т, кг). (10.34) Длина (м.м) тормозного конуса (прорезей) (Aj, см; Vq, м/.мин - на- у= 0,46-tga. (10.35) В стучае путевого торможения одновременно на входе и выходе из цилиндра (см. рис. 7.15) наибольшее усилие (Н), развива-
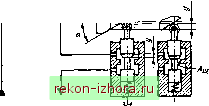 Рис. 10.7. Схема торможения цилиндра с использо-вание.ч тормозного золотника 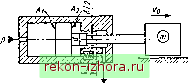 Прн равнозамедленном торможении увеличение давления в задней полости цилиндра 720x4, Рис 108, Схема торможения цилиндра с использованием тормозной втулки емое цилиндром при заданном рабочем давлении [7], F = 0,28- (10.36) где Vq - начальная скорость движения, м/мин; X - тормозной путь, мм; т - масса перемещающихся узлов, приведенная к штоку, кг. Часто для торможения цилиндров применяются тормозные втулки, входящие с малым зазором в отверстие крышки (рис. 10.8). Б этом случае диаметральный зазор (мкм) без учета сил трения 166 \7 (10.37) (А Лз, см; V, м.ч/с; d, х, мм; т, кг, v, м/мин; р, МПа), Если необходимо, чтобы в противополож- jq. ном направлении поршень начинал движение с большой скоростью, в крышку встраивается обратный клапан. 10.2. Рекомендуемые соотношения между ходом s и диаметром D цилиндра В некоторых случаях размеры цилиндра определяются требованиями плавности движения или возможностью обеспечения малых подач при минимальных стабильно поддерживаемых расходах дросселирующих устройств. Установлено, что устойчивое (плавное) движение горизонтально расположенных механизмов подачи агрегатных станков (минимальная подача 4 мм/мин) может быть обеспечено только при определенном соотношении между диаметром D цилиндра и ходом s (табл. 10.2). Сжимаемость масла в рабочей полости цилиндра приводит к запаздыванию т (с) начала движения его штока: Q, л/мин; £, МПа), (10.38) где А - площадь поршня; Др - изменение давления, обеспечивающее начало движения (при наличии повышенных утечек расход Q должен соответственно у.мень-шаться). Статическая жесткость цилиндра (Н/мм) ii + Vio (0,1*-Я,)А2--У2о (10.39) Д мм 200 400 630 800 1000 1250 1600 2000 Область неустойчивого движения Переходная область Область УСТОЙЧИВОГО движения где Я, - высота столба масла, см, в полости с площадью Л см К,, Va - о&ьемы масла, см, в полостях и соединительных линиях в крайних положениях поршня; Е - модуль упругости масла, МПа, s - ход поршня, мм. Жесткость зависит от положения поршня. Для си.м.метричного цилиндра минимальная жесткость (Н/мм) 20ЕА (10,40) Собственная частота (Гц) привода с ци-линдро.м f=5y[c/ m (С, Н/мм; т, кг). (10.41) При проектировании вращающихся гидроцилиндров (см. рис. 7.11) необходимо правильно выбрать основные размеры масло-подводящего устройства (рис. 10.9), в котором имеются значительные потери мощности из-за трения и утечек масла через зазор между вращающейся оправкой / и втулкой 2. Поскольку при рекомендуемом (для исключения заклинивания) диаметральном зазоре 6 = (0,4d--20) мкм (где d - диаметр оправки, мм) с ростом длины перекрытия / (м.м) потери на трение увеличиваются, а утечки снижаются, существует оптимальная длина перекрытия (Q,4rf-h20)p vdn (10,42) которой соответствует оптимальная утечка (л/мин) GyT,o T = 0,56- 10-d0,4rf4-20)n (10.43) и минимальная потеря мощности (кВт) <хгшш= 1.864-10-V(0,4d-b20)np, (10,44) где р - давление зажима, МПа; v - вязкость масла, мм/с (сСт), обычно в зазоре V = (104-11) мм7с; п - частота вращения, об/.мин. Существенно уменьшить потери мощности и утечки удается путем применения маслоподводящих устройств специальных конструкций (см., например, рис. 7,9, б, в). Следящие приводы. Условие абсолютной устойчиюсти линеаризованного следящего привода (см. рис. 6,1) имеет вид СЖр, (10.45) где Кр- коэффициент усиления следящего привода по нагрузке, Н/мм (отношение нагрузки к рассогласованию у - х). Достижи.мая точность (мм) следящего привода У-х =F/Kp , (10,46) где / - сила трения, Н. Как показывает практика, условие (10.45) дает завышенные запасы устойчивости. Уточнение может быть выполнено путем учета имеющихся в приводе нелинейно-стей. Положительно влияют на устойчивость увеличение рабочей площади цилиндра, силы трения и .модуля упругости гидравлических емкостей, включенных во внешнюю цепь управляющего золотника; уменьшение диаметра и увеличение жесткости трубопроводов, соединяюшик золотнике цилиндром; увеличение жесткости механической связи гидродвигателя с рабочим органом и утечек в цилиндре; уменьшение массы подвижных частей привода, перемещения золотника, приходящегося на единицу смещения щупа, и длины хода цилиндра, а также утечек через золотник в среднем положении [16]. Условия динамической устойчивости могут определяться с использованием методов теории автоматического регулирования. При этом, как правило, проводится анализ линейной модели (рассматриваются отклонения в мало.м, не учитываются нелинейности в виде сухого трения, насыщения по давлению и расходу, фортш расходных характеристик управляющих золотников и т. п.), адекватность которого определяется правомерностью сделанных допущений. 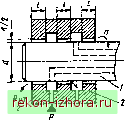 Рис 10.9. Схема маслоподводящего устройства с кольцевыми канавками для вращающегося гидроцилиндра
|
|||||||||||||||||||
|
© 2003 - 2026 Prom Izhora
При копировании текстов приветствуется обратная ссылка |